搅拌摩擦焊缝检测系统
Loading...



Sorry, this page is not available in your country
Let us know what you're looking for by filling out the form below.
搅拌摩擦焊缝(FSW)检测系统过去十年中,火箭发射量大幅增加。用于推动火箭进入太空的燃料箱由一些通过搅拌摩擦焊(FSW)方式焊接在一起的大型弧形部件制成。搅拌摩擦焊(FSW)是一种固态接合工艺;这种工艺使用高速旋转的圆柱形工具(搅拌针)加热两块轻金属的对接区域,以将它们焊接在一起。为了防止出现安全问题,需要从多个方向对焊缝进行检测,以确定焊缝中是否存在某种缺陷,如:未焊透、飞边、虫洞、孔洞以及焊根和焊趾中的缺陷。 奥林巴斯开发了一种用于检测搅拌摩擦焊缝的独特的机器人检测系统。 |
搅拌摩擦焊缝中的缺陷类型相比传统的焊接方式,搅拌摩擦焊接(FSW)有更多的优势;搅拌摩擦焊接可以避免生成那些在使用其它焊接方式时,伴随液相冷却而生成的缺陷类型。还有一些缺陷类型主要是由于温度或焊接条件不足而形成;必须要对这些缺陷正确识别和定量。 | |
天然缺陷搅拌摩擦焊缝中可能会出现不同类型的缺陷,例如:焊缝两侧材料之间接合的连续性不完整(被称为“飞边”)、长孔洞形缺陷,及未焊透缺陷。此外,由于搅拌摩擦焊接工艺的特性,焊缝中还会生成随机定向缺陷。 |
搅拌摩擦焊缝制造过程的示意图 |
校准用缺陷位于外壁和内壁的纵向、横向和斜向刻槽在校准过程中被用作参考缺陷。还会使用横通孔绘制时间校正增益(TCG)曲线;这种曲线表明材料内部的信号衰减情况。 |
制造过程中生成的随机定向缺陷 |
灵活变通的检测解决方案搅拌摩擦焊缝(FSW)检测系统的相控阵探头可以探测到焊缝区域中多个不同方向上的缺陷。 全自动检测系统可以探测到大型圆柱形燃料箱中的典型缺陷。
|   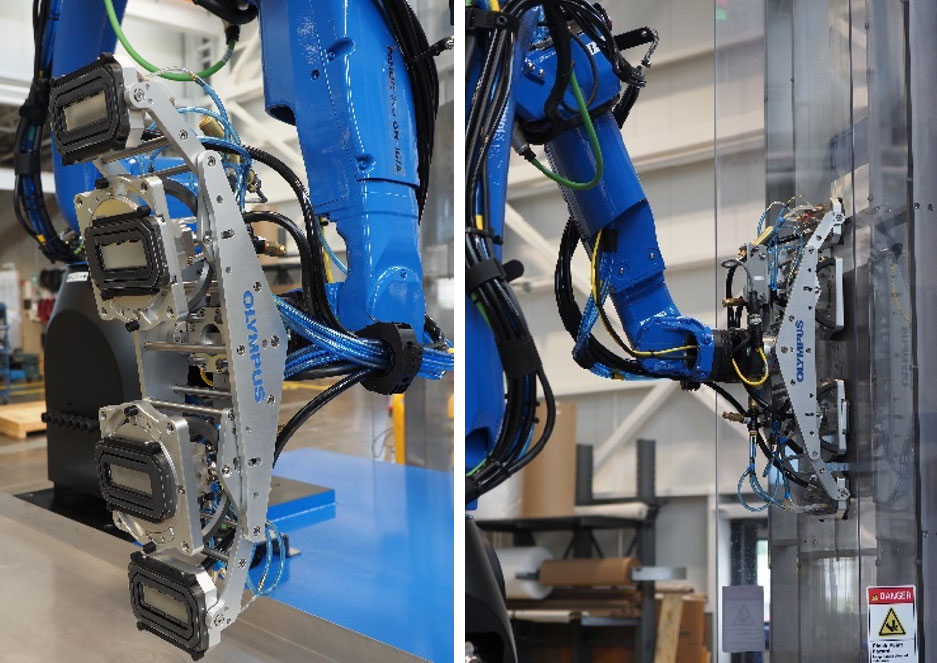 |
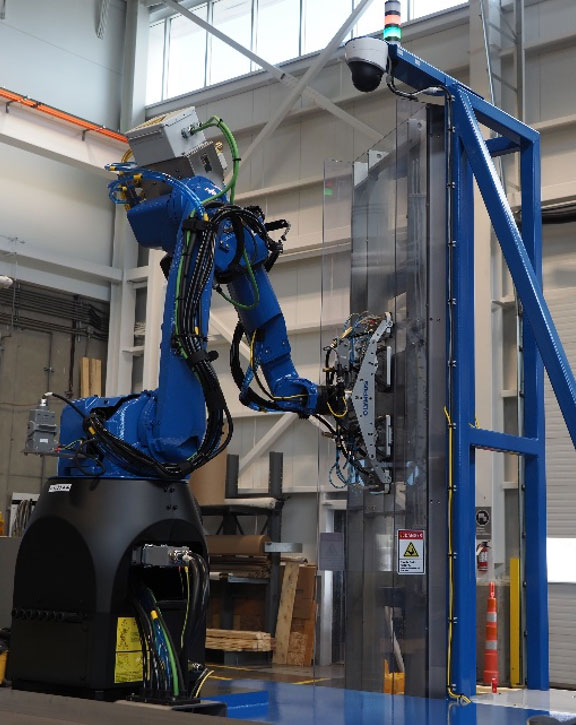 | 机器人检测平台搅拌摩擦焊缝(FSW)检测系统是一个功能齐备的交钥匙检测站,可以被直接安装在生产线上。 大型圆柱形燃料箱的焊缝被呈送到协作机器人(Cobot)面前。机器人将检测头定位在焊缝上,然后燃料箱旋转,直到整个周向焊缝得到检测。接下来,燃料箱被移走,并对下一个燃料箱的焊缝重复以上检测过程。 系统的主要组成部分:
|
运动和采集软件用于系统简单操作的运动软件:
用于数据采集和分析的WeldSight软件
|   |
多功能、高效率的系统优势特性
|
您即将被转换到我们的本地网站。