全聚焦方式声学影响图
Chi-Hang Kwan
Guillaume Painchaud-April
Benoit Lepage
Artículo presentado originalmente al simposio de investigación ASNT 2019.
RESUMEN
En este artículo, presentamos un modelo semianalítico recientemente desarrollado para prever el mapa de sensibilidad de amplitud del método de focalización total (TFM) con respecto a defectos direccionales y no direccionales. En el caso de trayectorias acústicas que involucran múltiples interacciones de interfaz y conversiones de modo de onda, el conocimiento provisto por el mapa de influencia acústica (AIM) permite que un inspector perfeccione su plan de escaneo para optimizar la relación entre señal-ruido de las representaciones obtenidas por el método de focalización completa e incrementar la probabilidad de detección de los defectos. La precisión de este nuevo modelo acústico ha sido probada y validada mediante experimentos donde se usaron bloques de ensayo dotados de taladros laterales y taladros de fondo plano. Los resultados obtenidos a partir de los experimentos de validación demuestran una buena concordancia entre los mapas de amplitud empíricos del TFM y el mapa de influencia acústica (AIM) teórico. Los resultados también indican que el modelo debe ser usado para guiar la selección del mejor modo de inspección TFM.
INTRODUCCIÓN
El método de focalización total (TFM) es una técnica de formación de haz dotada de apertura sintética que ha estado bajo un desarrollo constante en la industria de los ensayos no destructivos durante la última década. Mediante la aplicación de los retardos de emisión y recepción apropiados a los datos A‑scan, reunidos a partir de los grupos de datos de la captura de matriz completa (FMC), el método de focalización total puede proporcionar de forma electrónica un enfoque en cada punto de una región de inspección. Debido a que cada punto es enfocado de forma electrónica, el método de focalización total puede proporcionar una mejor resolución al ser comparado con las técnicas de inspección convencionales por ultrasonido multielemento (Phased Array). Asimismo, cuando se calcula y aplica el tiempo de vuelo de múltiples modos acústicos, el método de focalización total multimodo puede proporcionar información adicional acerca de la muestra bajo inspección [2].
A pesar de las ventajas que vienen de ser mencionadas, el método de focalización total presenta limitaciones que son regidas por leyes físicas. Un área de inspección puede presentar una sensibilidad débil debido a los efectos en la interacción de la interfaz, las limitaciones de formación del haz y la atenuación en la trayectoria de propagación. Dado el desarrollo novedoso del TFM, la falta de códigos/estándares de inspección y la complejidad del procesamiento de imágenes por el TFM multimodo, los inspectores por lo general omiten las limitaciones físicas del método de focalización total, dificultando la definición de un óptimo plan de escaneo que maximice la relación entre señal-ruido (SNR) y la probabilidad de detección. Por consiguiente, no existe ninguna necesidad de presentar una herramienta que evalúe el mapa de sensibilidad acústica para un determinado plan de escaneo de inspección por TFM.
REGIÓN DE INFLUENCIA ACÚSTICA
El mapa de influencia acústica (AIM) es un mapa de sensibilidad de amplitud acústica teórico para un plan de escaneo TFM dedicado a una inspección específica. En general, el mapa de influencia acústica varía según la dispersión provocada por los defectos direccionales y los no direccionales. Los ejemplos de ensayos no destructivos relativos a las dispersiones no direccionales cubren impurezas y porosidad en las soldaduras, mientras que las dispersiones direccionales cubren falta de fusión en soldaduras y varias grietas. La respuesta de dispersión direccional de un defecto es un parámetro importante que frecuentemente se olvida en el modelado de sistemas de sondas de ultrasonido multielemento (Phased Array).
Para calcular el mapa de influencia acústica (AIM), hemos desarrollado un modelo acústico semianalítico basado en el rayo sonoro que calcula la respuesta de dos formas de presión en los modos de inspección TFM de pulso-eco, autotándem y doble salto. Este modelo acústico toma en cuenta los efectos de los coeficientes de transmisión y reflexión, la dispersión de haz geométrico y la atenuación del material. Asimismo, en nuestros modelos, también hemos usado la difracción integral Rayleigh-Sommerfeld [3] para modelar la repuesta de dispersión en campo lejano en un taladro de fondo plano (FBH). La respuesta de dispersión del taladro de fondo plano es usada para simular los defectos direccionales.
EXPERIMENTOS DE VALIDACIÓNPara evaluar la precisión del modelo acústico, hemos ejecutado experimentos de validación a fin de comparar mapas de amplitud TFM con un mapa de influencia acústica (AIM) de TFM calculado de forma teórica. Los resultados obtenidos a partir de los dos experimentos de validación se exponen en esta sección. El primer experimento de validación se desarrolló en un bloque de ensayo dotado de taladros laterales (SDH), que representan la respuesta de dispersión a partir de las dispersiones provocadas por defectos no direccionales. El segundo experimento de validación se desarrolló en un bloque de ensayo dotado de taladros de fondo plano (FBH), que representan la respuesta de dispersión a partir de las dispersiones provocadas por defectos direccionales. Conforme a los resultados expuestos en este documento, el eje X ha sido definido positivo a la derecha del primer elemento de la sonda, y el eje Z ha sido definido positivo debajo de la superficie de la muestra bajo ensayo. La Figura 1 ilustra el diagrama esquemático de este sistema de coordenadas. |  Figura 1: Sistema de coordenadas usado en el presente documento |
Validación de taladro lateral (SDH)
El experimento de validación del taladro lateral se ejecutó en un bloque de ensayo de acero 1018 NAVSHIPS de versión métrica dotado de seis taladros laterales de 1,2 mm (0,05 pulg.) de diámetro con profundidades de 6,25 mm a 37,5 mm en incrementos de 6,25 mm. Al voltear el bloque de ensayo, es posible examinar los taladros de fondo plano con profundidades de 6,25 mm a 68,75 mm. Para este experimento, se usó una sonda de 32 elementos 5L32-A31 con una frecuencia central de 5 MHz y emisión de elemento de 0,6 mm. La sonda se montó en una suela (zapata) de Rexolite SA31-N55S-IHC a 36.1º. La Figura 2 ilustra el diagrama esquemático de la configuración experimental.
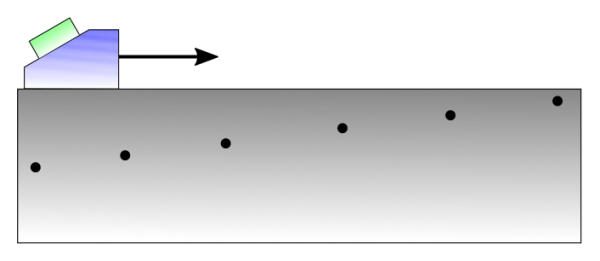
Figura 2: Diagrama esquemático de la configuración experimental para la validación del taladro lateral (SDH). Note que solo se muestra la orientación del escaneo superior.
Al desplazar la sonda sobre la superficie del bloque de ensayo, se obtuvieron ecos de dispersión a partir de taladros laterales de diferentes posiciones relativas a la sonda. Los grupos de datos de la captura de matriz completa han sido reunidos a partir de cada posición de escaneo para un procesamiento posterior en vista de generar mapas de amplitud TFM empíricos. En la siguiente subsección se proporciona una descripción del algoritmo de procesamiento posterior.
Generación de un mapa de amplitud TFM empírico
Los principales pasos para generar un mapa de amplitud TFM empírico son:
- Para un defecto específico en una posición de escaneo fija, se usa una puerta de profundidad (dirección del eje Z) a fin de obtener una línea de amplitud a lo largo del ancho del mapa de amplitud.
- Repita el paso 1 en el caso de diferentes posiciones de escaneo a fin de obtener una línea de amplitud compuesta para un defecto específico.
- Repita los pasos 1 y 2 para cualquier otro defecto a fin de obtener líneas de amplitud compuestas en diferentes posiciones del eje Z.
- Interpole las líneas de amplitud compuestas en la dirección Z para obtener el mapa de amplitud final.
Vea el paso 1 tal como se ilustra en la Figura 3. La Figura 3 muestra que primero se forma una banda a lo largo del ancho del mapa de amplitud según las profundidades especificadas por la puerta del eje Z. La posición de la puerta del eje Z fue seleccionada en función de la profundidad conocida del defecto. En cada posición del eje X siguiendo la banda TFM, la amplitud máxima es llevada a la dirección del eje Z para obtener la línea de amplitud que se muestra en la parte inferior de la Figura 3.
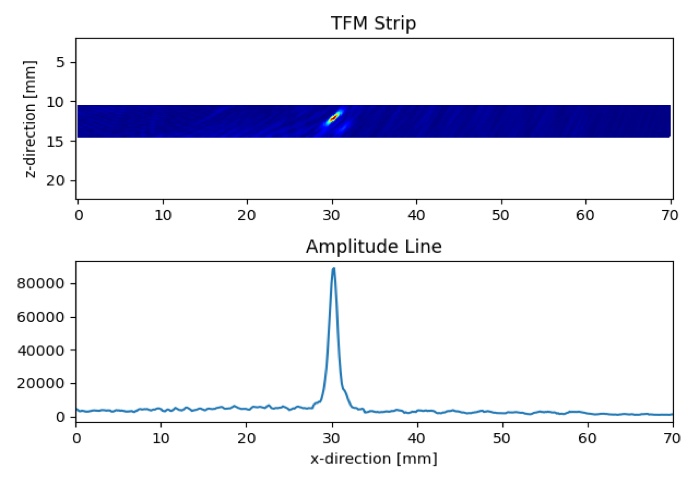
Figura 3: Procedimiento para obtener una línea de amplitud para un defecto específico
Para formar la línea de amplitud compuesta para un defecto específico, se comparan todas las líneas de amplitud, obtenidas en diferentes posiciones de escaneo y se registran los valores de máxima amplitud. Este procedimiento se ilustra en la Figura 4.
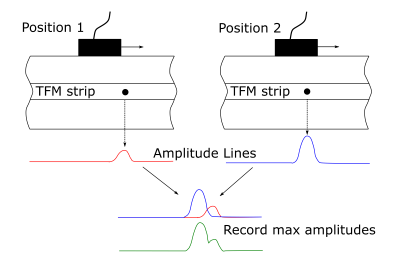
Figura 4: Procedimiento para formar líneas de amplitud compuestas en diferentes posiciones de escaneo
Después de formar la línea de amplitud compuesta para un defecto específico, el proceso se repite para todos los defectos en diferentes profundidades. La Figura 5 muestra las líneas de amplitud compuestas del modo TT en pulso-eco (Pulse-Echo) obtenidas a partir de los taladros laterales del bloque de ensayo NAVSHIPS (orientación superior e inferior). En la Figura 5 y en todas las representaciones que derivan del TFM experimental y son expuestas en este documento, las amplitudes de las representaciones TFM no están normalizadas. Debido a que el digitalizador de 12 bits es usado en los dispositivos electrónicos y la sonda alberga 32 elementos, la máxima amplitud teórica en la imagen TFM es 2097152 (212 ÷ 2 × 32 × 32).
Note que las líneas de amplitud compuestas para los taladros laterales en las profundidades de 6,25 mm, 62,5 mm y 68,75 mm no han sido incluidas en la Figura 5. Debido a la cercanía de estos taladros laterales a los límites laterales del bloque de ensayo, fue imposible obtener líneas de amplitud compuestas completas a lo largo del completo ancho del mapa de amplitud.
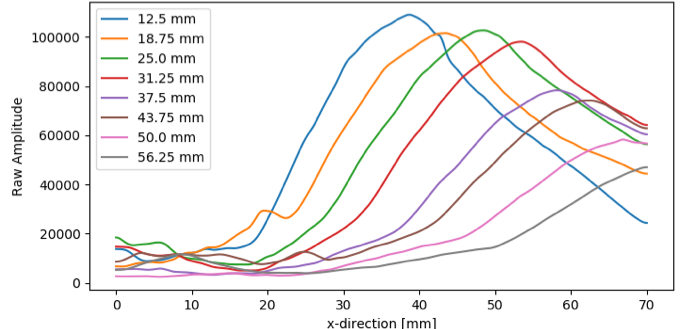
Figura 5: Líneas de amplitud compuestas de los taladros laterales presentes en el bloque de ensayo NAVSHIPS.
Comparación de mapas de amplitud TFM empíricos con el mapa de influencia acústica (AIM)
Al efectuarse la interpolación en la dirección del eje Z en las líneas de amplitud compuestas que se muestran en la Figura 5, se obtuvo el mapa de amplitud TFM empírico de la Figura 6 (a).
La Figura 6 (a) muestra que el plan de escaneo TFM presenta escasa sensibilidad tanto en los ángulos de orientación bajos (30º) como los altos (>70º). La escasa sensibilidad en los ángulos de orientación es causada por los valores reducidos del coeficiente de transmisión de la suela (zapata) Rexolite en el bloque de ensayo de acero [4]. En cambio, la escasa sensibilidad en los altos ángulos de orientación se debe a un enfoque deficiente causado por los números F efectivos [5]. Estas conclusiones son coherentes conforme a las directrices recomendadas para los ángulos de orientación en las inspecciones angulares por ultrasonido multielemento (Phased Array).
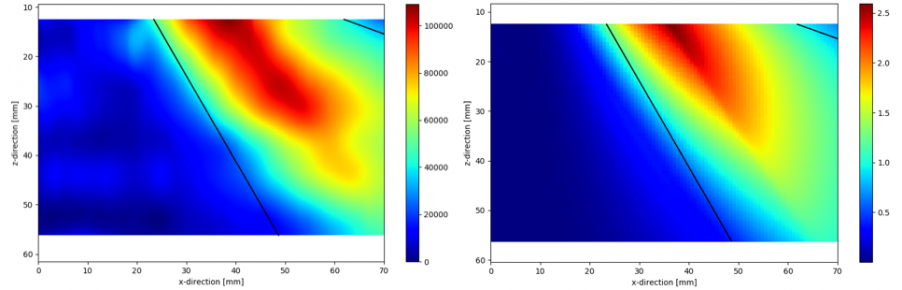
Figura 6: (a) Mapa de amplitud empírico de taladro lateral y (b) mapa de influencia acústica (AIM) del taladro lateral dedicado al modo TT en pulso-eco. Se agregaron las directrices angulares de orientación de 30º y 70º (a partir del punto medio de la apertura activa). El mapa de influencia acústica (AIM) teórico correspondiente al taladro lateral se muestra en la Figura 6 (b).
Al comparar las imágenes (a) y (b) en la Figura 6, es evidente que el modelo acústico puede prever precisamente el área en el plan de escaneo que tiene una óptima sensibilidad. La discrepancia entre las dos imágenes puede atribuirse a las pequeñas variaciones en la presión del acoplamiento cuando la sonda es desplazada a lo largo de la superficie del bloque de ensayo. Note que la amplitud del mapa de influencia acústica (AIM) teórico se encuentra en unidades arbitrarias debido a que es extremamente difícil modelar la magnitud exacta de las señales de tensión recibidas a partir del sistema de adquisición. Sin embargo, debido a que unidades arbitrarias coherentes son usadas para los diferentes mapas de influencia acústica, aún es posible comparar las sensibilidades acústicas de los diferentes planes de escaneo y los diferentes modos acústicos.
Validación de taladro de fondo plano
Para evaluar la precisión del modelo acústico con el fin de prever la sensibilidad de amplitud para los defectos direccionales, se han llevado a cabo experimentos en un bloque de ensayo con labrado personalizado. El bloque de ensayo tiene un espesor de 20 mm y se dota de taladros de fondo plano que fueron perforados para coincidir con el perfil de una soldadura típica de bisel en J. Para este estudio, se usaron cinco taladros de fondo plano cuyos vectores normales superficiales se orientaban a 3º por debajo del trazo horizontal. La Figura 7 muestra una imagen del bloque de ensayo con los defectos del eje de escaneo.
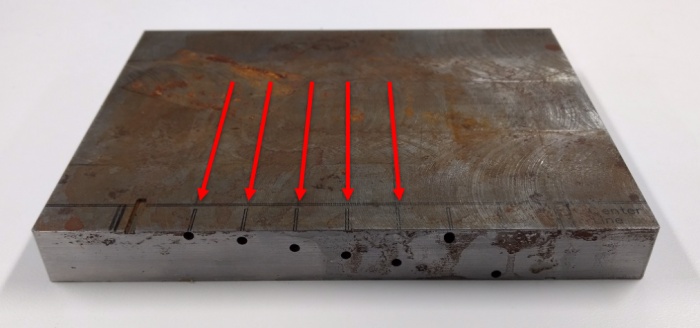
Figura 7: Bloque de ensayo con taladros de fondo plano con labrado personalizado que muestra el eje de escaneo
Para este experimento, se usó una sonda 5L32-A32 de 32 elementos con una frecuencia central de 5 MHz y un elemento de emisión de 1 mm. La sonda se montó en una suela (zapata) de Rexolite SA32-N55S-IHC a 36.1º. Debido a que las orientaciones de las superficies de fondo de los taladros de fondo plano son casi verticales, los grupos de datos de la captura de matriz completa fueron procesados en modos autotándem (un solo salto). La Figura 8 ilustra un diagrama esquemático del plan de escaneo.
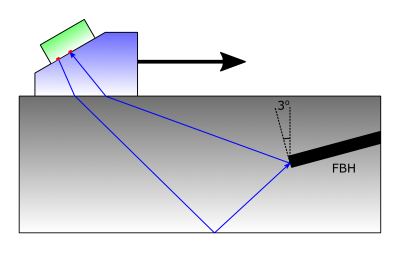
Figura 8: Diagrama esquemático del experimento de validación que muestra el modo TFM en autotándem
Comparación de mapas de amplitud TFM empíricos con el mapa de influencia acústica (AIM)
Las imágenes (a) y (b) de la Figura 9 muestran respectivamente el mapa de amplitud empírico de los taladros de fondo plano y el mapa de influencia acústica (AIM) teórico de taladros de fondo plano configurado en el modo TTT autotándem. Al comparar los dos esquemas, es obvio que el modelo acústico proporciona una estimación precisa de la sensibilidad acústica relativa dentro de la región de escaneo. La Figura 9 evoca que el modo TTT autotándem se adapta mejor a la detección de defectos verticales que se ubican en el fondo de la muestra bajo ensayo.
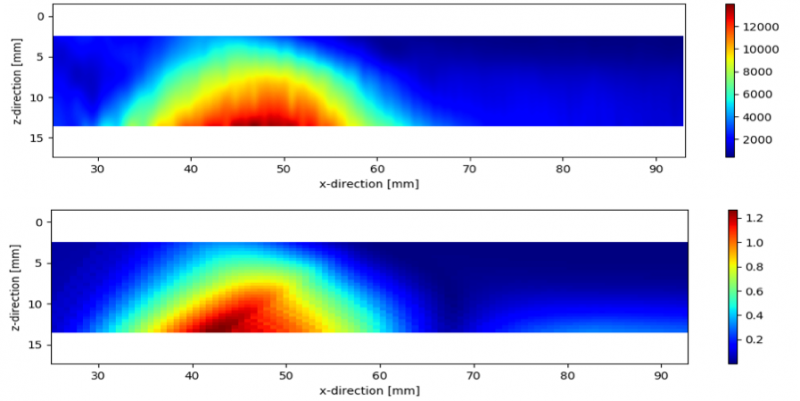
Figura 9: (a) Mapa de amplitud empírico de taladros de fondo plano y (b) mapa de influencia acústica (AIM) teórico de taladros de fondo plano en modo TTT autotándem
Las imágenes (a) y (b) de la Figura 10 muestran respectivamente el mapa de amplitud empírico de los taladros de fondo plano y el mapa de influencia acústica (AIM) teórico de los taladros de fondo plano configurados en el modo TLT en autotándem. Una vez más, es obvio que el modelo acústico proporciona una estimación precisa de la sensibilidad acústica relativa dentro de la región de escaneo. Las oscilaciones del mapa de amplitud empírico, de x = 25 mm (1 pulg.) a x = 40 mm (1,6 pulg.), son causadas por interferencias a partir de otros modos acústicos que presentan tiempos de recorrido similares.
Asimismo, al comparar la Figura 9 y la Figura 10, se aprecia que los niveles de amplitud máxima entre los dos modos autotándem son de aproximadamente 3,3 (13800/4200) en el caso de los mapas de amplitud empíricos y de 3,4 (1,23/0,36) en el caso del mapa de influencia acústica (AIM) teórico. La similitud de niveles de amplitud evoca que el modelo acústico puede ser usado para predecir la sensibilidad acústica relativa a través de diferentes modos de procesamiento de imágenes del TFM.
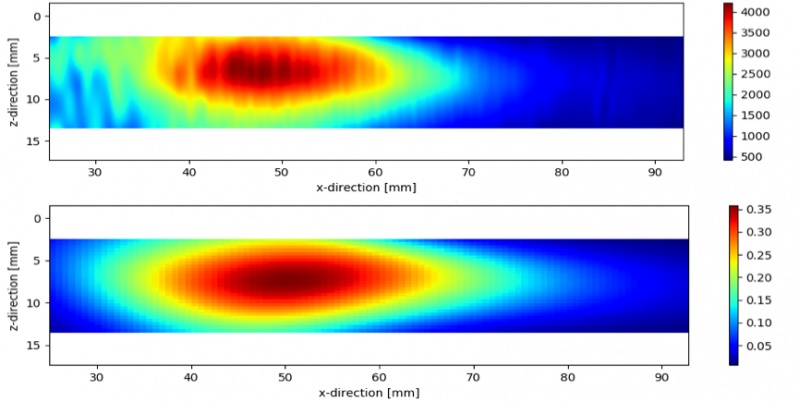
Figura 10: (a) Mapa de amplitud empírico de taladros de fondo plano y (b) mapa de influencia acústica (AIM) teórico de taladros de fondo plano para el modo TLT autotándem
Aplicación de ejemplo
Para demostrar aún más la utilidad del modelo acústico, se da a conocer el ejemplo de una aplicación real en donde el mapa de influencia acústica (AIM) es usado como guía para seleccionar el modo de inspección TFM apropiado. Con respecto a este ejemplo, se inspeccionó una muestra de soldadura con bisel en V dotada de un defecto conocido por falta de fusión. El ángulo de la soldadura es aproximadamente 35º, y se usó la misma sonda 5L32-A32 y la suela (zapata) SA32-N55S-IHC que sirvió para el experimento de validación de los taladros de fondo plano. La Figura 11 ilustra el diagrama esquemático de la configuración experimental.
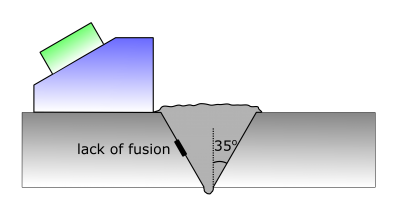
Figura 11: Diagrama esquemático relativo a la inspección de falta de fusión.
En el modelo teórico, el defecto de falta de fusión es simulado con un defecto de taladro de fondo plano con un diámetro de 5 mm (0,2 pulg.) que cuenta con una superficie de fondo orientada a 35º lejos del trazo vertical. La Figura 12 muestra el mapa de influencia acústica (AIM) teórico correspondiente para el modo TLT autotándem y el modo TTTT de doble salto.

Figura 12: Mapa de influencia acústica (AIM) teórico para una plan de inspección dedicado a una falta de fusión en (a) el modo TLT autotándem y (b) el modo TTTT de doble salto.
La Figura 12 muestra que el mapa de influencia acústica (AIM) en el modo TLT es más regular en comparación con el mapa de influencia acústica (AIM) en el modo de doble salto. Por ende, sería más difícil obtener una evaluación coherente del tamaño de la falta de fusión mediante el modo TLT. Asimismo, la amplitud esperada, a partir del modo TLT, es tres órdenes de magnitud más baja que en el caso del modo de doble salto. Mediante el uso de estos mapas de influencia acústica (AIM) teóricos se prevé que el modo TTTT de doble salto es el preferido en el procesamiento de imágenes por el método de focalización total (TFM). La Figura 13 muestra las representaciones experimentales por el método de focalización total correspondiente.
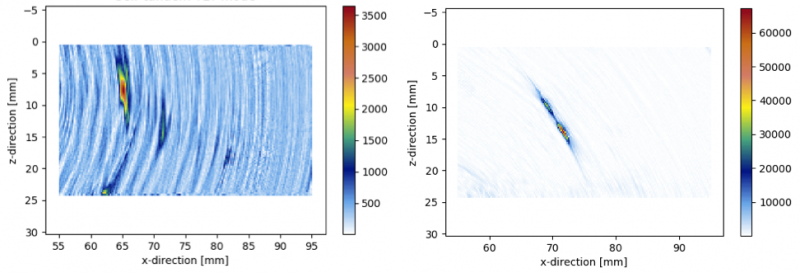
Figura 13: Representaciones TFM del defecto de falta de fusión en el modo (a) TLT autotándem y (b) TTTT de doble salto.
La Figura 13 demuestra que la representación TFM en doble salto se dota de una buena relación entre señal-ruido y proporciona una evaluación correcta del tamaño del defecto de falta de fusión. Por otro lado, la representación TFM en autotándem presenta una relación deficiente entre señal-ruido y ecos parásitos/aislados que son difíciles de interpretar. Los ecos parásitos/aislados son como ecos refractados a partir de las puntas pronunciadas del defecto de falta de fusión. Sin embargo, la dimensión y el tipo del defecto son difíciles de evaluar en el modo TLT autotándem.
La imagen (a) de la Figura 12 confirma la deficiente relación entre señal-ruido de la representación TFM en el modo TLT autotándem con una baja amplitud. No obstante, se debe resaltar que el nivel de las amplitudes de eco en los dos modos expuestos en la Figura 13 es inferior que el nivel de amplitud previsto por el mapa de influencia acústica (AIM) teórico en la Figura 12. Debido a que la geometría del defecto de falta de fusión es diferente al modelo para los taladros de fondo plano que se usó para simular el defecto, puede que las amplitudes del eco difractado a partir de las puntas pronunciadas del defecto de falta de fusión sean subestimadas en el modelo teórico.
CONCLUSIONES
Se ha demostrado que un modelo acústico puede prever precisamente el mapa de amplitud del TFM para defectos direccionales y no direccionales. En un modo de inspección específico, el modelo puede ser usado para ajustar el plan de escaneo (apertura, frecuencia de escaneo, ubicación de la sonda, etc.) a fin de optimizar la relación señal-ruido y la probabilidad de detección. Debido a que el modelo proporciona una comparación de la amplitud relativa en diferentes modos acústicos, también puede ser usado para seleccionar el modo de reconstrucción óptimo por el método de focalización total (TFM). Acorde a una visión a largo plazo, se planea extender el modelo a geometrías más complejas e incluir más modelos de dispersión de defectos para incrementar su utilidad.
REFERENCIAS
[1] C. Holmes, B. W. Drinkwater, y P. D. Wilcox, «Post-processing of the full matrix of ultrasonic transmit–receive array data for non-destructive evaluation» NDT E Int., vol. 38, N.º. 8, págs. 701–711, diciembre de 2005.
[2] K. Sy, P. Bredif, E. Iakovleva, O. Roy, y D. Lesselier, «Development of methods for the analysis of multi-mode TFM images» J. Phys. Conf. Ser., vol. 1017, pág. 012005, mayo de 2018.
[3] L. W. S. Jr, Fundamentals of Ultrasonic Nondestructive Evaluation: A Modeling Approach, segunda publicación de la edición Springer International, 2016.
[4] Foundations of Biomedical Ultrasound. Oxford, New York: Revista de la Universidad de Oxford, 2006.
[5] S. I. Nikolov, J. Kortbek, and J. A. Jensen, «Practical applications of synthetic aperture imaging» en 2010 IEEE International Ultrasonics Symposium, San Diego, CA, 2010, págs. 350–358.
[6] E. A. Ginzel and D. Johnson, «Phased-Array Resolution Assessment Techniques» pág. 13.