
Acoustic Influence Map(AIM)モデリングツールは、OmniScan™ X3探傷器の発売とともに導入されて以来、トータルフォーカシングメソッド(TFM)のスキャンプラン設計に不可欠な支援ツールになりました。AIMでは、さまざまなTFM波形セットと散乱体タイプをTFM音響強度の範囲で推定するため、欠陥検出率(POD)が最大になるスキャンプランを作成できます。
MXU 5.10のリリースからは、AIMへの3つの大幅なアップグレードを利用でき、OmniScan X3およびX3 64スキャンプランツールの機能と使いやすさがさらに向上します。
1. 3D検査形状のサポート
これまでのAIMでは、TFM検査領域が素子の主軸の直下にあるリニアプローブのみがサポートされていました。MXU 5.10の更新からは、平面、円周方向外径(COD)、軸方向外径(AOD)の形状に対応可能な、Dual Linear Array™(DLA)およびDual Matrix Array™(DMA)プローブがサポートされるようになりました。この変更は、AIMモデルの基本的な枠組みを大幅に修正することで実現しています。
新しくなったAIMモデルでは、市販の音響シミュレーションソフトウェアパッケージと同様の結果が得られます。例えば、AOD形状に対するL-L TFM波形セットについて、新しいAIMモデルで生成された画像と、CIVA 2021(開発元:CEA LIST)から取得された感度マップを比較してみましょう。
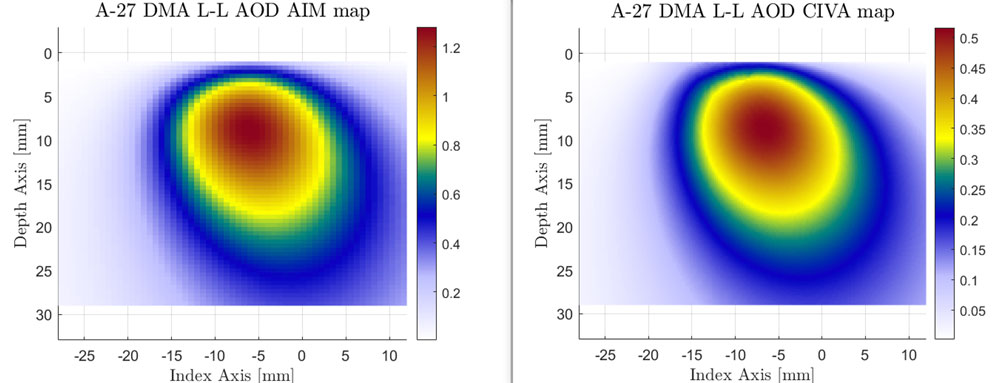
AOD形状に対してL-LモードでA27プローブを使用した、AIMモデル(左)とCIVAソフトウェア(右)の比較
このテストケースでは、外径10.75インチ(273.05 mm)のパイプに対して、4DM16X2SM-A27プローブとSA27-DN55L-FD25-IHC-AOD10.75ウェッジを使用しました。ご覧のとおり、新AIMモデルとCIVA 2021モデルは、このAOD形状に対してDMAプローブを使用した場合にほぼ同様のマップを示します。
2. プローブの近距離音場の精度が向上
改善されたAIMモデルの2つ目の利点は、プローブの近距離音場のシミュレーション精度が向上したことです。精度の向上は接触検査の場合に明白なので、以下のサンプル画像の取得には一振動子型の直接接触型探触子を使用しました。素子のサイズは1 mm × 10 mm、中心周波数は5 MHzです。
以下の画像は、新旧のAIMモデルと正確なレイリー数値モデルによる、単一素子の近距離音場応答を比較したものです。正確なレイリーモデルは、単一素子の表面にある、一様に分布する100,000点源からの応答を合計して構築されます。
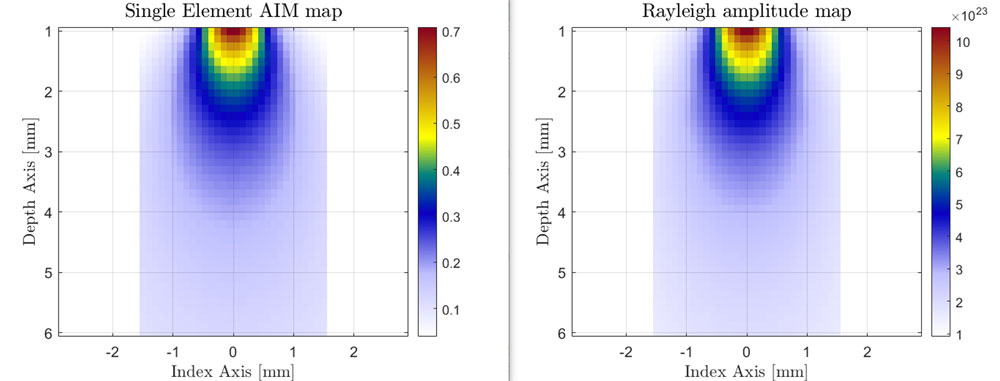
L-Lモードで一振動子型探触子を使用した場合の新AIMと正確なレイリーモデルの比較
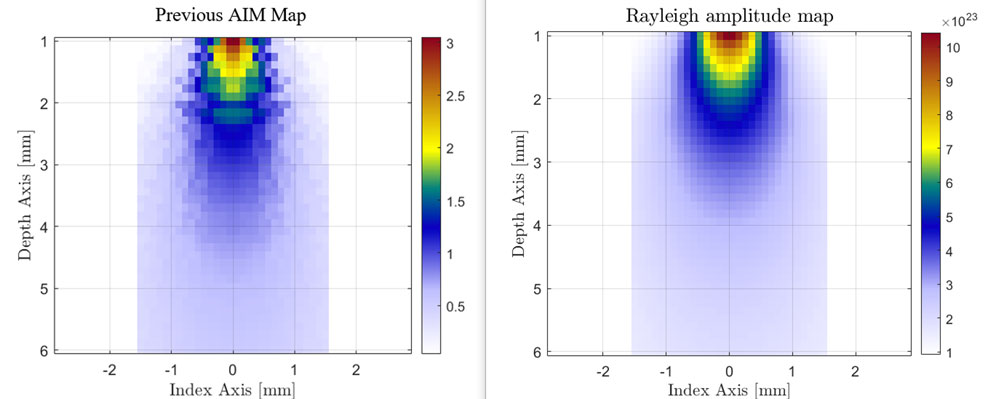
L-Lモードで一振動子型探触子を使用した場合の旧AIMと正確なレイリーモデルの比較
素子表面から1 mm(0.04インチ)の観察距離でさえ、新AIMモデルとレイリーモデルの結果が同様であることに注目してください。一方、旧AIMモデルでは近距離音場に揺れがあり、この領域の直接接触モードのシミュレーション精度に影響しています。
3. 正規化された感度インデックス
MXU 5.10より前のAIMの感度インデックスは、異なる波形セット間の相対感度を比較するためだけに使用できる任意の比例単位でした。スケール変更が行われた現在の感度インデックスでは、スキャンプランの感度をより直感的に解釈できるようになりました。次のセクションでは、各AIMマップの感度インデックスを生成するためにMXUソフトウェアで実行される計算について説明します。ただしその後で、正規化された感度インデックスを解釈し、それを実際に適用する方法を示す、いくつかの具体例を紹介します。
AIM感度インデックスの理論上の最大値の計算
感度インデックスは、AIMマップの最大振幅値に対応します。ピクセルごとに、3つの要素(送信応答、受信応答、散乱係数)によって振幅が決まります。
(1)

方程式(1)の定義は以下のとおりです。
- Nは送信素子の数、Mは受信素子の数です。
- Tiは、i番目の送信素子からの送信応答です。最大値1は完全な送信を表します。つまり、そのピクセルの送信強度は、送信素子面の強度と同じ値です。
- Rjは、j番目の受信素子からの受信応答です。最大値1は完全な受信を表します。つまり、散乱強度は受信素子面で完全に受信されます。
- αijは、i番目の送信素子からj番目の受信素子への散乱係数を表します。最大値1は完全な散乱を表します。つまり、そのピクセルの入射強度は受信方向に向かって完全に散乱しています。
方程式(1)は、N個の送信素子とM個の受信素子がある場合に、感度の理論上の最大値はNMであることを示しています。ただし、通常のTFM設定構成ではこの値に到達しません。
平面と球面の散乱体タイプにおける感度インデックスの違い
以前のバージョンのAIMと同様に、MXU 5.10のAIMでは「球面」と「平面」のどちらの散乱体もサポートしています。新しいAIMモデルでは、球面散乱体はピクセルの入射強度が受信方向に向かって完全に散乱する、理想的な点散乱体として扱われています。つまり、トランスミッターとレシーバーのあらゆる組み合わせについて、αijの値が1になります。
AIMにおける平面散乱体は、直径3 mmの円形中空としてモデリングされます。散乱係数αijは、3D空間の法線、入射、反射、観測の各ベクトルのほか、周波数が関係する複雑な関数です。これらのベクトルを示す模式図は次のようになります。
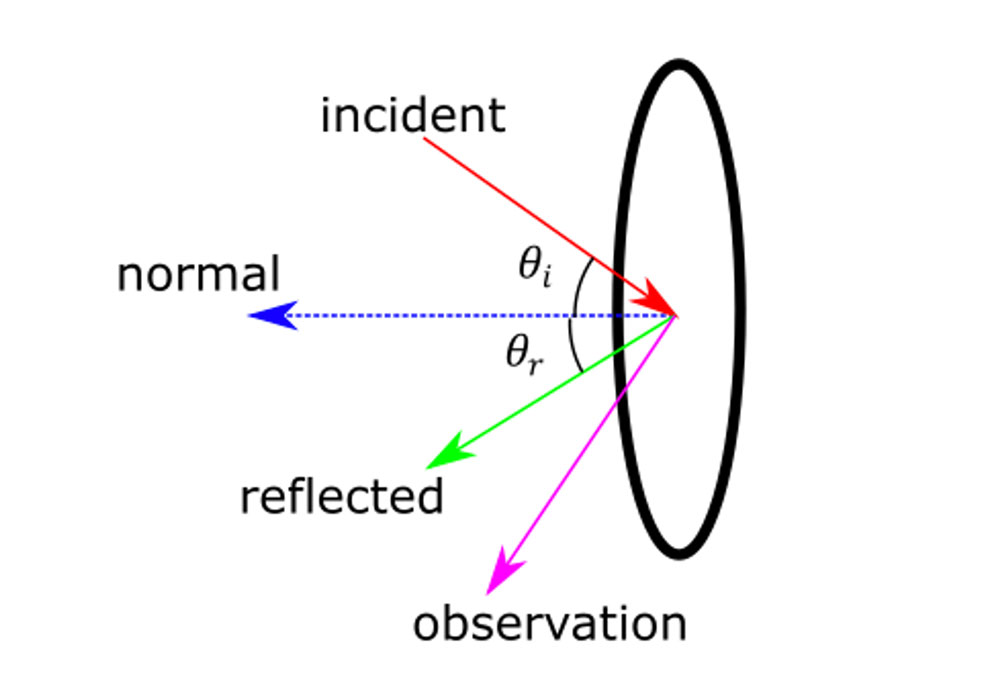
円形中空散乱体の法線、入射、反射、観測の各ベクトルを示す模式図
図4の円形中空例で、方向性散乱体の表面でモード変換がない場合、反射角θrは入射角θiと等しくなります。観測ベクトルは、法線、入射、反射のベクトルで作られる平面上にはないことにも留意してください。
このタイプの散乱体では、入射、反射、観測のベクトルがすべて法線ベクトルと一致する場合、αijは最大値1に達します。これは、送信ビームと受信ビームが、方向性のある欠陥に対して完全に垂直である場合に、パルスエコーモードで見られます。αijの値が1になるのは、Tx/Rxの特殊な組み合わせの場合に限られるため、一般に平面散乱体のAIMマップの感度インデックスは、理想的な球面散乱体の対応する感度インデックスよりも低くなります。
AIMの正規化された感度インデックスの解釈および比較方法
同一の5L32-A32リニアプローブを使用した3つの異なる構成における、AIMマップとその感度インデックスの例を、このセクションで紹介します。以下の各例では、それぞれの解釈方法についての説明があります。
最初の構成では、球面散乱体に対してプローブを直接接触L-Lモードで使用し、対応するAIMマップは以下のように表示されます。
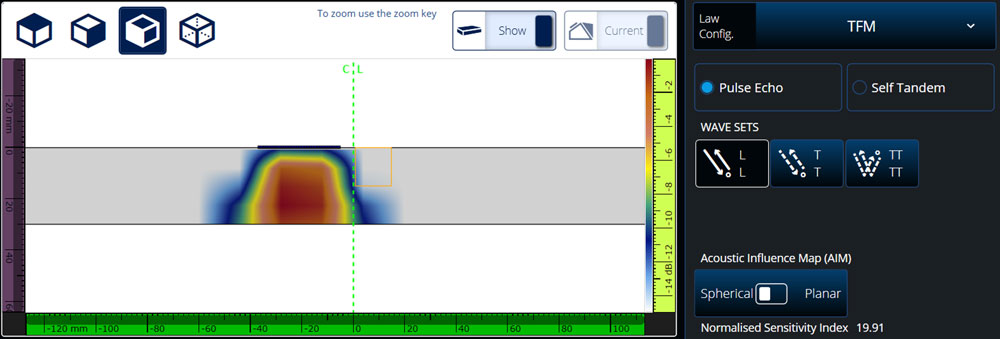
構成1:直接接触L-Lモードの球面AIMマップ(感度インデックス = 19.91)
この構成の場合、理論上の最大感度インデックスは1024ですが(送信素子32個、受信素子32個)、正規化された感度インデックスは19.91です。最大値からのずれは、主に素子の指向性と形状的なビームの広がりによるものです。
2つ目の構成では、プローブをSA32LS-N55S-Group Dウェッジに結合し、COD形状に対してT-Tモードで使用しています。パイプの外径は10.75インチ(273.05 mm)に設定されています。球面散乱体に対するAIMマップは以下のように示されます。
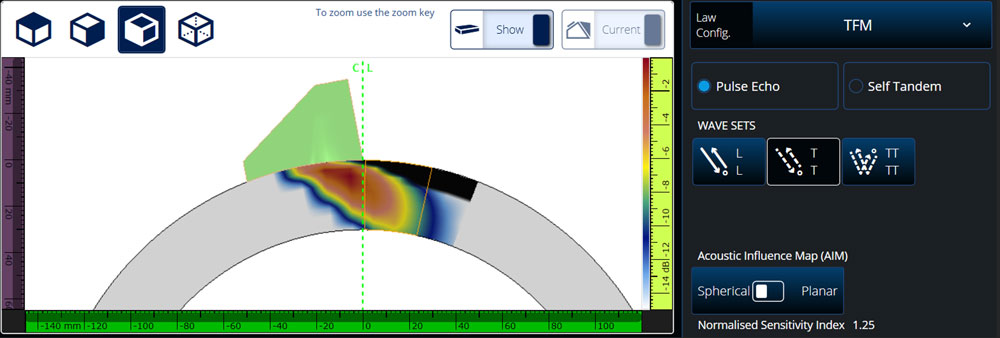
構成2:COD L-Lモードの球面AIMマップ(感度インデックス = 1.25)
このAIMマップでは、ウェッジ正面の外径面付近に、黒いピクセルが少しあるのがわかります。この黒いピクセルは、ウェッジの物理的界面により、素子からピクセルまでの1つ以上の音響経路が追跡できないことを示します。感度インデックスは1.25となっていて、前の直接接触型構成と同等の欠陥振幅を得るには、ゲインを24 dB付加する必要があることを示しています。感度インデックスが低下した大きな原因は、形状的なビームの拡がりの増加と、ウェッジ/試験体の界面の複雑な屈折係数にあります。
3つ目の構成は2つ目と同じですが、AIMマップが平面反射源に対するものになっています。
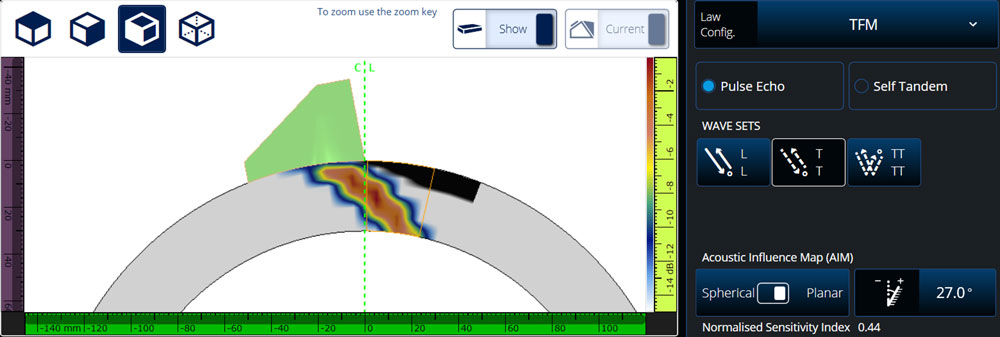
構成3:COD L-Lモードの平面AIMマップ(感度インデックス = 1.25)
欠陥角度は27°に設定されているため、欠陥の法線はビームの主な伝搬方向に対してほぼ垂直になります。欠陥の方向性が最適であっても、平面散乱体の感度インデックスは0.44にすぎません。この感度インデックスは前のマップの1.25より低くなっています。これは、欠陥表面とビームの伝搬方向の完全な垂直性が、送信素子と受信素子のすべての組み合わせについては得られないためです。
ソフトウェアダウンロードページにアクセスして(“OmniScan”までスクロール)、MXU 5.10に更新すると、新しいAIMアップグレードをご利用いただけます。
関連コンテンツ
ホワイトペーパー:TFM Acoustic Influence Map
このページをブックマークしましょう。トータルフォーカシングメソッド(TFM)のリソースへ便利な1か所からアクセス
お問い合わせ
