概述
各种测量仪器均可测量表面粗糙度
表面粗糙度测量仪分为接触式和非接触式两种。
|
| 方法 | 测量仪器 | 优点 | 缺点 |
| 接触式测量 | 触针式粗糙度测量仪 |
|
|
| 非接触式测量 | 相干扫描干涉仪 |
|
|
| 激光显微镜 |
|
| |
| 数码显微镜 |
|
| |
| 扫描探针显微镜(SPM) |
|
|
OLS5000显微镜的表面粗糙度解决方案 |
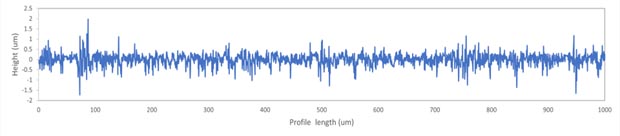
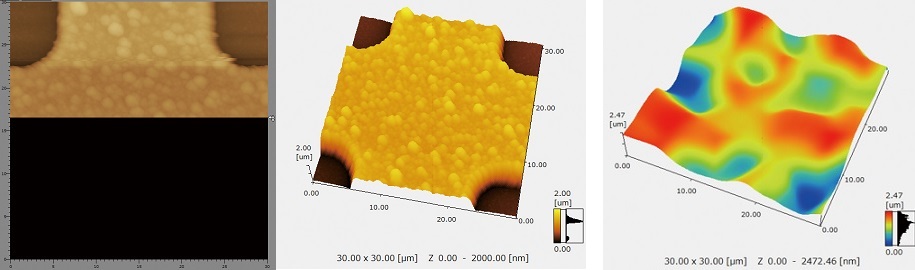
能否将触针式表面粗糙度测量仪和激光显微镜的数据关联起来? 尽管激光显微镜能够以非接触方式快速获取数据而备受赞誉,但是人们担心其结果可能与使用传统触针式工具获取的数据不相关联。尽管使用不同的测量原理时难免会出现一些差异,但通过尽可能统一测量和分析条件,可以实现很高程度的相关性。 以下是激光显微镜和触针式表面粗糙度测量仪的数据对比。 图1显示的是在应用滤波器之前使用激光显微镜采集的原始数据,图3是触针式测量仪获取的数据。在使用触针型工具时,通常会事先对采集的数据应用一个λs滤波器(在本例中,λs=2.5 µm),因此我们也对激光显微镜的原始数据应用相同的λs滤波器(图1),以便进行比较。 在图1中应用λs = 2.5 µm的滤波器,得到图2中的数据。 通过比较图2和图3,我们可以看到它们是一致的。因此,我们可以推断,通过匹配测量条件并应用相同的滤波器条件,从激光显微镜和触针式测量仪获得的数据可以相互关联。 样品:Rubert粗糙度标准第504号 图1. 激光(原始数据):物镜20×(NA0.6)
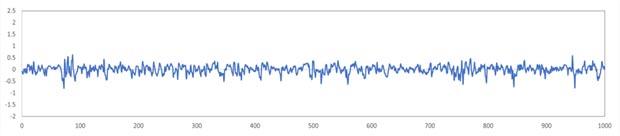
图2. 激光(带滤波器):物镜20×(NA0.6)
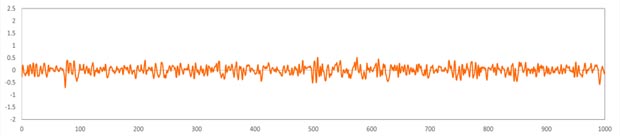
图3. 触针(NA0.6)
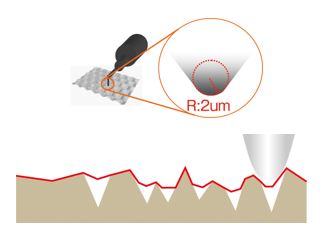
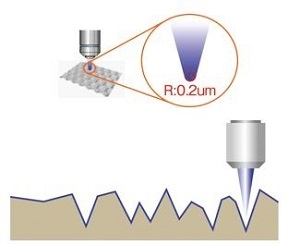
触针的尖端半径为2 µm至10 µm,因此很难捕捉到粗糙度的细微变化。此外,由于触针尺寸很小,很难对电线等细小区域进行测量。
不过,OLS5000显微镜使用的激光直径仅为0.2 µm,因此能够测量细微的不规则性,从微小的目标区域获取数据。
|
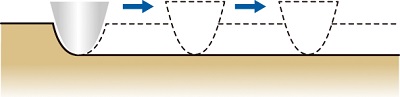
触针的另一个缺点是其探针需要与样品表面直接接触。对于柔软或易碎的样品,触针实际上会造成样品损坏。
触针可能会损坏样品表面 由于OLS5000显微镜使用的激光无需接触样品即可获取信息,因此您可以在不损坏样品的情况下获得准确的粗糙度测量结果。
胶带256 × 256 μm |
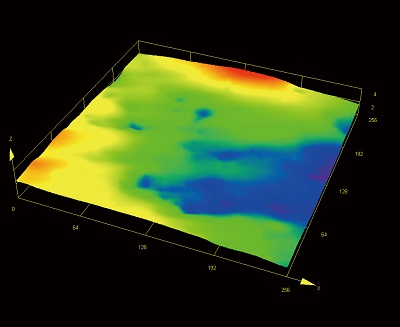
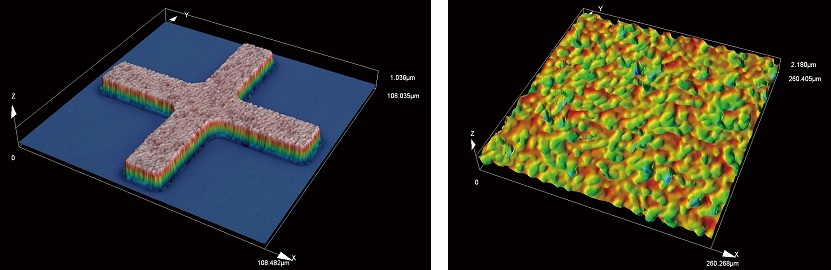
尽管白光干涉仪可为光滑表面提供亚纳米级的探测灵敏度,但也存在一些缺点。首先是难以准确测量陡峭(粗糙)的斜面,因此不适用于许多应用。它们的传感器往往还会忽略微弱的信号,使干涉仪进行准确测量的能力进一步复杂化。虽然它们配备了一个物镜,但其数值孔径小于光学显微镜,且水平分辨率较低,因此很难获得清晰、实时的样品图像。
|
而OLS5000显微镜使用激光进行测量,并配有高数值孔径的专用物镜。无论样品表面如何,即使非常陡峭,也可以使用这些功能进行准确的测量。高质量物镜还可使您在采集测量数据的同时查看样品,并在进行测量时获取图像数据。
|
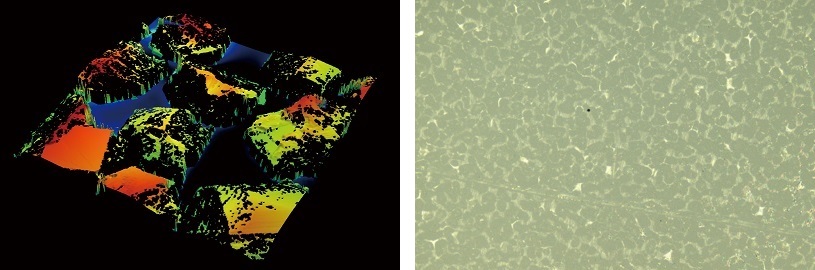
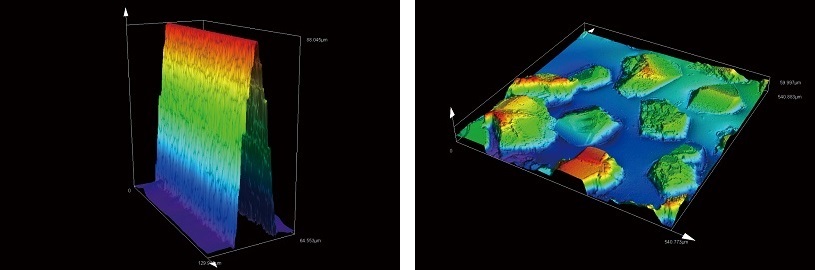
扫描探针显微镜能够进行亚纳米级测量,但其悬臂式扫描系统使得数据采集过程非常耗时。它们的扫描区域也仅限于100 µm左右,因此不适合测量大型特征和低倍率观测。
|
OLS5000激光显微镜可以更快地完成亚纳米级测量。您还可以使用其宽视场观察亚微米级的不规则性。其拼接功能进一步扩大了分析区域。
|
国际标准化国际标准化组织(ISO)正在推动面积测量标准的制定,许多基本标准已经获得采纳。下表列出了适用于轮廓法和区域法的主要标准。 轮廓法标准基于接触式触针测量仪而制定。 这些标准对包括评估长度、截止值、探针尖端半径等测量条件要求做出了统一规定。在制定区域法标准时,要使用基于不同工作原理的各种测量仪器,因此无法给出统一的测量条件要求。因此,用户需要根据评估目的确定合适的测量条件。要了解有关确定测量条件的技巧,请参阅“使用激光显微镜评估表面粗糙度的要点”。 轮廓法和区域法的主要标准 |
| 轮廓法 | 区域法 | |
| 表面结构参数 | ISO 4287:1997 | ISO 25178-2:2012 |
| ISO 13565:1996 | ||
| ISO 12085:1996 | ||
| 测量条件 | ISO 4288:1996 | ISO 25178-3:2012 |
| ISO 3274:1996 | ||
| 滤波器 | ISO 11562:1996 | ISO 16610系列 |
| 测量仪器的分类 | - | ISO25178-6:2010 |
| 测量仪器的校准 | ISO 12179:2000 | 准备中 |
| 校准用标准试样 | ISO 5436-1:2000 | ISO25178-70:2013 |
| 图表法 | ISO 1302:2002 | ISO25178-1:2016 |
技术术语和说明 |
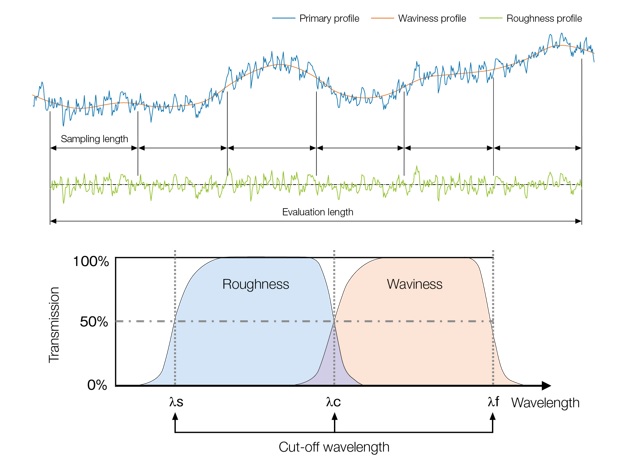
原始轮廓曲线该曲线通过对测量到的原始轮廓应用截止值为λs的低通滤波器的方式而获得。根据原始轮廓计算出的表面结构参数被称为原始轮廓参数(P参数)。 粗糙度轮廓该轮廓曲线通过对原始轮廓应用截止值为λc的高通滤波器以抑制长波成分而获得。根据粗糙度轮廓计算出的表面结构参数被称为粗糙度轮廓参数(R参数)。 波纹度轮廓该轮廓曲线通过对原始轮廓依次应用截止值为λf和λc的两个轮廓滤波器而获得。λf滤波器抑制长波成分,λc滤波器抑制短波成分。根据波纹度轮廓计算出的表面结构参数被称为波纹度轮廓参数(W参数)。 轮廓滤波器用于分离轮廓中长波和短波成分的滤波器。定义了三种类型的滤波器:
| 截止波长轮廓滤波器的阈值波长。该波长表示给定波幅下50%的传输系数。 采样长度用于确定轮廓特征的X轴方向上的长度。 评估长度用于对所评估轮廓进行分析的X轴方向的长度。
轮廓法概念图 |
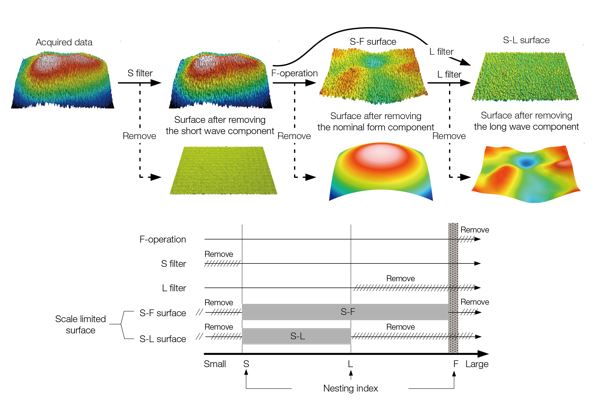
尺度限定表面表面数据是计算区域表面结构参数(S-F表面或S-L表面)的基础。有时简称为“表面”。 区域滤波器这是用于分离尺度限定表面中长波和短波成分的滤波器。根据功能定义了三种类型的滤波器:
注:高斯滤波器通常作为S和L滤波器使用,且F运算采用总体最小二乘关联。 高斯滤波器这是一种区域滤波器,通常用于区域测量。通过基于从高斯函数导出的加权函数的卷积进行滤波。嵌套指数值是传输50%波幅的正弦曲线的波长。 样条滤波器这是一种与高斯滤波器相比,在外围边缘失真更小的区域滤波器。 嵌套指数该指数代表区域滤波器的阈值波长。区域高斯滤波器的嵌套指数用长度单位表示,相当于轮廓法中的截止值。 | S-F表面使用S滤波器去除小波长成分,然后再通过F运算去除某些形状分量而获得的表面。 S-L表面使用S滤波器去除小波长成分,然后再通过L滤波器去除大波长成分而获得的表面。 评估区域所指定的表面上用于特征评估的矩形区域。评估区域应为正方形(除非另有规定)。
区域法概念图 |
使用激光显微镜评估表面粗糙度的要点 |
1. 根据要测量的项目(粗糙度、波纹度或不均匀性),从下表中选择合适的物镜。确保工作距离(WD)大于样品和镜头之间的间距。
2. 如果有多个备选物镜,请做出最终选择。测量视场的大小应该是感兴趣的最粗糙结构尺度的五倍。
- 如果有多个物镜可供选择,需选择数值孔径(NA)最大的物镜。
- 如果没有合适的物镜可选,则要么重新选择(这次请包括标记为“根据用途可接受”的物镜),要么考虑使用拼接功能扩大测量区域。
| 物镜 | 参数 | 测量项目 | |||||
| 数值孔径(N.A.) | 工作距离(W.D.)(单位:mm) | 焦斑直径*(单位:μm) | 测量视场**(单位:μm) | 粗糙度 | 波纹度 | 不均匀性(Z) | |
| MPLFLN2.5X | 0.08 | 10.7 | 6.2 | 5120 × 5120 | X | X | X |
| MPLFLN5X | 0.15 | 20 | 3.3 | 2560 × 2560 | X | X | X |
| MPLFLN10XLEXT | 0.3 | 10.4 | 1,6 | 1280 × 1280 | X | ○ | △ |
| MPLAPON20XLEXT | 0.6 | 1 | 0.82 | 640 × 640 | △ | ○ | ○ |
| MPLAPON50XLEXT | 0.95 | 0.35 | 0.52 | 256 × 256 | ◎ | ○ | ◎ |
| MPLAPON100XLEXT | 0.95 | 0.35 | 0.52 | 128 × 128 | ◎ | ○ | ◎ |
| LMPLFLN20XLEXT | 0.45 | 6.5 | 1.1 | 640 × 640 | △ | ○ | ○ |
| LMPLFLN50XLEXT | 0.6 | 5 | 0.82 | 256 × 256 | △ | ○ | ○ |
| LMPLFLN100XLEXT | 0.8 | 3.4 | 0.62 | 128 × 128 | ○ | ○ | ◎ |
| SLMPLN20X | 0.25 | 25 | 2 | 640 × 640 | X | ○ | △ |
| SLMPLN50X | 0.35 | 18 | 1.4 | 256 × 256 | X | ○ | △ |
| SLMPLN100X | 0.6 | 7.6 | 0.82 | 128 × 128 | △ | ○ | ○ |
| LCPLFLN20XLCD | 0.45 | 7.4–8.3 | 1.1 | 640 × 640 | △ | ○ | ○ |
| LCPLFLN50XLCD | 0.7 | 3.0–2.2 | 0.71 | 256 × 256 | ○ | ○ | ○ |
| LCPLFLN100XLCD | 0.85 | 1.0–0.9 | 0.58 | 128 × 128 | ○ | ○ | ◎ |
* 理论值。
|
◎ : 最合适
|
表面特征分析中使用的各种滤波器功能、滤波器组合以及滤波器尺寸如下所述: 滤波条件根据分析物镜确定。 滤波器功能在进行表面特征参数分析时,应根据测量物镜,对所获取的表面结构数据考虑使用三种类型的滤波器(F运算、S滤波器和L滤波器)。 |
|
滤波器组合
三种滤波器(F运算、S滤波器和L滤波器)有八种组合。请参考下表所列的测量物镜,选择要使用的滤波器组合。
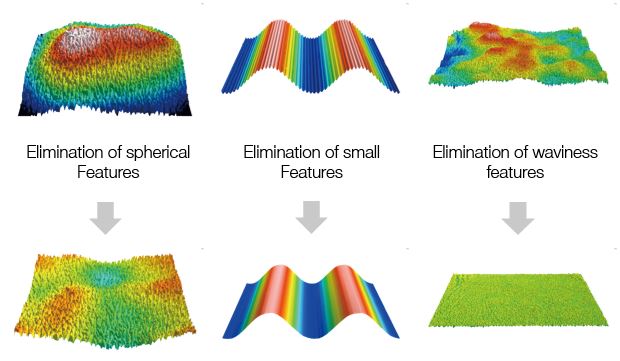
| 预期目的 | 分析采集到的原始数据 | 去除波纹度成分 | 去除球体、曲线和其他形状成分 | 去除球体、曲线和其他形状成分,并去除波纹度成分 | 去除小的粗糙度成分和噪声 | 去除小的粗糙度成分、噪声和波纹度成分 | 去除球体、曲线和其他形状成分,并去除小的粗糙度成分和噪声 | 去除小的粗糙度成分和噪声;去除球体、曲线及其他特征成分;去除波纹度成分 |
| F运算 | - | - | 〇 | 〇 | - | - | 〇 | 〇 |
| S滤波器 | - | - | - | - | 〇 | 〇 | 〇 | 〇 |
| L滤波器 | - | 〇 | - | 〇 | - | 〇 | - | 〇 |
- : 不适用
○ : 适用
滤波器大小(嵌套指数)
滤波强度(分离能力)被称为嵌套指数(L滤波器也称为截止值)。
- 嵌套指数值越大,S滤波器去除的细节特征成分就越多
- 嵌套指数值越小,L滤波器去除的波纹度特征成分就越多
尽管建议在定义嵌套指数时使用数字值(0.5、0.8、1、2、2.5、5、8、10、20),但却存在以下限制:
- S滤波器的嵌套指数值需要超过光学分辨率(≒焦斑直径),且至少是数据采样间隔值的三倍
- 要将L滤波器的嵌套指数值设置为小于测量区域的值(矩形区域窄边的长度)