搅拌摩擦焊缝检测系统
概述
Prüfsystem für RührreibschweißnähteIn den letzten zehn Jahren hat die Anzahl von Raketenstarts stark zugenommen. Treibstofftanks, mit denen Raketen ins All geschossen werden, bestehen aus großen zylindrischen Teilen, die mittels Rührreibschweißen (FSW) verbunden werden. FSW ist ein Festkörper-Fügeverfahren, bei dem ein rotierendes zylindrisches Werkzeug zwei Leichtmetallteile im Fügebereich erhitzt und miteinander verbindet. Aus Sicherheitsgründen muss die Schweißnaht in mehreren Richtungen auf diverse Fehler geprüft werden, z. B. fehlende Durchdringung, lose Haftung, durchgehende Löcher, Hohlräume sowie Fehler an Schweißnahtansatz und Schweißnahtwurzel. Olympus hat ein einzigartiges robotergestütztes Prüfsystem zur Prüfung von Rührreibschweißnähten entwickelt. |
Fehlerarten bei RührreibschweißnähtenDas Rührreibschweißen hat mehrere Vorteile gegenüber herkömmlichen Schweißverfahren. So werden Fehler vermieden, die mit anderen Schweißverfahren beim Erstarren in der flüssigen Phase entstehen. Zusätzliche Mängel treten meistens durch unzureichende Temperaturen oder Schweißbedingungen auf. Diese Mängel müssen korrekt identifiziert und ihre Größe richtig bestimmt werden. | |
Natürliche DefekteBei Rührreibschweißnähten können verschiedene Mängel auftreten, wie fehlende Haftung zwischen den Materialien der Schweißnahtseiten, lange tunnelähnliche Fehler und fehlende Durchdringung. Beim Rührreibschweißen können unterschiedlich verlaufende Mängel in der Schweißnaht entstehen. |
Schematische Darstellung der Herstellung von Rührreibschweißnähten |
Künstliche Fehler zur KalibrierungLängs, quer und schräg verlaufende Nuten, die sich am Außen- und Innendurchmesser befinden, werden als Referenz für die Kalibrierung eingesetzt. Querbohrungen werden auch eingesetzt, um eine TCG-Kurve (zeitkorrigierte Verstärkungskurve) zu erstellen, die die Signalschwächung im Material berücksichtigt. |
Unterschiedlich verlaufende Defekte, die bei der Herstellung entstanden sind. |


Flexible PrüflösungDie Phased-Array-Sensoren des FSW-Prüfsystems prüfen den Schweißbereich auf Mängel in mehreren Ausrichtungen. Das vollautomatische System erkennt die typischen Fehler, die in großen zylindrischen Treibstofftanks auftreten.
|   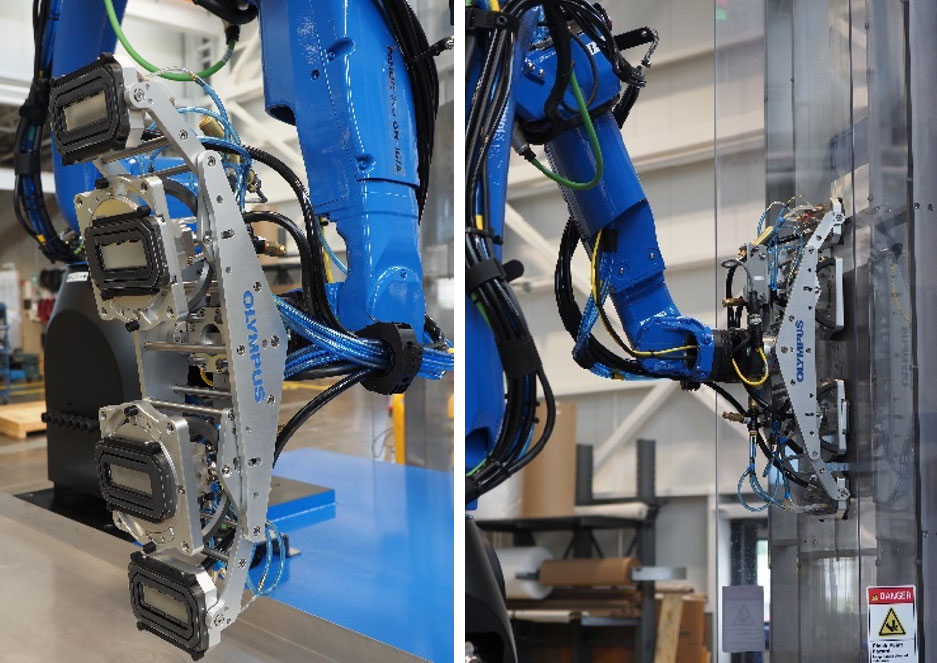 |
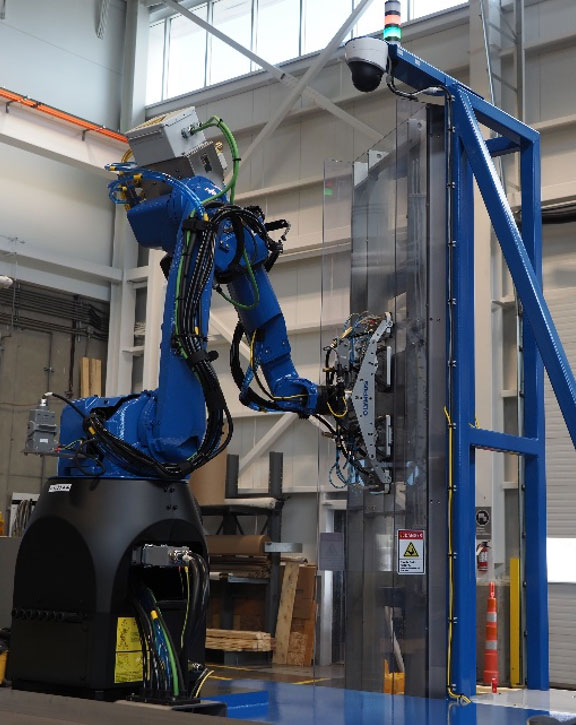 | Robotergestützte PrüfplattformDas FSW-Prüfsystem ist eine schlüsselfertige Prüfstation und direkt auf der Produktionsstraße installierbar. Große Treibstofftank-Rundnähte werden dem kollaborierenden Roboter (Cobot) präsentiert. Er positioniert den Sensor; der Tank wird gedreht und die gesamte Rundnaht inspiziert. Der Tank wird dann weiter bewegt und der Zyklus bei der nächsten Schweißung wiederholt. Hauptkomponenten des Systems:
|
Motion- und ErfassungssoftwareEinfache Systembedienung durch Motion-Software:
WeldSight Software zur Datenerfassung und -analyse:
|   |
Vielseitiges und effizientes SystemVorteile
|

