このブログでは38DL PLUS™から39DL PLUS™モデルに切り替わった超音波厚さ計を紹介しています。新モデルの機能と性能に関する最新情報は、39DL PLUS のウェブページをご覧ください。
Apellix™は飛行ロボットシステムによる腐食管理を請け負っています。無人航空機(UAV)やドローンとも呼ばれる飛行ロボットは、正確な飛行と自動化をソフトウェアで制御しています。
米国フロリダ州ジャクソンビルを拠点とするこの会社は、オリンパスOEM供給会社であり、当社の超音波厚さ計38DL PLUS™(38DLP™)を飛行ロボットシステムに組み込んで、塗装、鉄鋼、金属の厚さの自律型測定を行っています。 ApellixのCEOであるBob Dahlstromさんに、このシステムの詳細と仕組みについて伺いました。
非破壊検査と飛行ロボットの組み合わせ
Apellixの事業は、自律型の塗装、コーティング、クリーニング、表面処理から始まりました。 やがて、鉄鋼や金属でできた産業資産の塗料の厚さを測定するニーズに気付きました。 以下に例を挙げます。
- 橋やダムなどのインフラ
- 石油・ガス産業の発電資産
- 製造施設
- 船舶
同社は、飛行ロボットと非破壊検査(NDT)を組み合わせて、塗装の厚さの自律型測定を安全かつ確実に行う事業を進めました。
安全性は石油・ガス産業の最優先事項であり、予期せぬダウンタイムは費用が高くつきます。 人々や環境の安全性のほか、インフラ資産の効率的な運用を維持するには、厳密なNDTプログラムが重要です。 超音波試験は、残存肉厚測定や腐食検査の実施に幅広く受け入れられているNDT方法です。 超音波試験技術の主な利点の1つは、部品を切断する必要がなく、厚さ測定を片側からすぐ簡単に実施できることです。
飛行ロボットシステムで超音波厚さ測定と腐食検査を行うには、携帯性、堅牢性、信頼性を備えた超音波厚さ計が必要でした。このため、Apellixは当社38DLP厚さ計を組み込むことにしました。「38DLPは望ましい業界標準なので、オリンパスの厚さ計を求める声がお客様から上がっていました」とBobさんは言います。
超音波厚さ計による腐食検出方法
超音波厚さ計は、パイプや地上貯蔵タンクなどのように、検査員が部品の片側からしかアクセスできないような場合や、サイズやアクセスが制限されているといった理由で単純な機械測定が不可能な場合または現実的でない場合に、材料の厚さを判定するのによく使われます。
超音波厚さ計の仕組みは、超音波探触子によって生成された音響パルスが、試験体内を伝搬し、反対面で反射して戻ってくるのにかかる時間を測定するというものです。 腐食金属の超音波試験は、通常、二振動子型探触子を使って行われます。 音波は材料の境界部から反射されるため、試験片の反対側からのエコーの時間を計ることによって材料の厚さが計測できます。レーダーやソナーが距離を測定するのと同じ方法です。
安全第一:安全手段としての飛行ロボットの機能
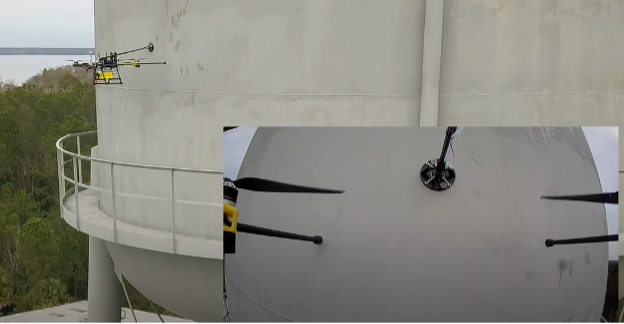
Apellix飛行ロボットプラットフォームは、ロボットが持つ精密性、信頼性、連続性能と、ドローンの飛行能力を組み合わせて、アクセスしにくい場所(ATEXゾーン2の潜在的に危険な環境を含む)の安全で費用効果の高い保守点検と検査を行います。

高所での検査は、高額で時間がかかる上、危険です。Apellixシステムでは、リフト、足場、ロープを使用する作業が不要になります。
「工業検査は必要かつ重要ですが、危険を伴い、多くの費用がかかる場合があります。飛行検査ロボットと自動化は、安全面と費用面で企業に役立ちます。 危険な環境の作業をドローンで行うようにプログラミングし、作業者を安全な場所に配置し、安全な作業場を確保します」とBobさんは言います。
Apellix飛行ロボットシステムの重要な部品

Apellix Opus X4 NDEシステム
空中のドローンは高所の作業に適しますが、繰り返しの作業用には設計されていません。産業用ロボットは長時間に及ぶ繰り返しの作業は安全に行えますが、飛ぶことはできません。
Apellixは、特許取得済みの飛行ロボットシステムを作り出しました。 この堅牢な産業用カスタムドローンには、以下が装備されています。
- マルチモーダルセンサーアレイシステム(センサーフュージョンと認知デバイスを組み込むことで、接触を検出し位置の特定が可能になるシステム)
- フルオンボードコンピューター
- 測定のために自動飛行して壁構造物への接触を可能にするカスタムソフトウェア
機体には、エンドエフェクターの付いた関節式ロボットアームが装備されています。エンドエフェクターとは、検査対象に物理的に接触する、アームの先端にある装置です。 エンドエフェクターには、超音波厚さ測定用の二振動子型探触子などの測定機器が含まれます。
自律型飛行とは
自律型飛行とは、独力で飛べることです。Apellix飛行ロボットシステムの自律型飛行では、パイロット(つまりオペレーター)は機体を検査対象の近くに配置し、ユーザーインターフェース上のスタートを選択します。オンボードコンピューターが後を引き継いで、飛行制御と検査を行ってから、ステーションまたは安全ゾーンに戻り、さらなる命令を受けます。
38DLP厚さ計は、超音波テクノロジーを使用して検査と測定を実施します。 飛行ロボットシステムは、接触測定のたび、壁面にプローブを配置する前に、二振動子型プローブにカプラントを自動供給します。 ユーザーインターフェースには、必要に応じてパイロットがカプラントを追加するためのオプションがあります。


測定を行うには、パイロットが機体を目的の検査領域までナビゲートし、自律型飛行を有効にします。オンボードコンピューターによって、機体は対象物の表面にプログラム飛行し、接触して測定値を読み取ります。

十分な測定値を取得すると、機体は壁面から安全な位置まで戻り、別の領域へのナビゲーションを待機します。 データは、地上の検査現場でリアルタイムに確認することも、クラウド内に安全に保存することもできます。 確認や記録保持のために、完全なデータをExcelまたはCSVファイルで取得することもできます。
Apellix Opus X4 NDEシステムでは、1時間あたり最大200か所の測定値を収集可能です。 NDE 4.0手法に対応するよう設計されているため、Enterprise Resource Planning(ERP)システム、Preventive Maintenance Checks and Services(PMCS)、Integrity Management Systems(IMS)や、安全なApellix飛行ログデータおよびレポート作成システムに自動的にデータが送られます。
飛行ロボットがリモートNDTにもたらす利点
大規模な資産のリモートNDT検査を実施する場合、飛行ロボットが持つ機動性は大きな利点をもたらします。 Apellixは、空中ロボットによって労働者を危害から遠ざけ、生産または保守点検プロセスの改善、資産のダウンタイムの削減、顧客のコストの大幅削減など、価値の高い用途に対して素早く対応できる独自の立場にあります。
ニュースリリースに述べられているように、Apellixが目指すのは以下の通りです。「既存のテクノロジーを当社のロボットプラットフォームに組み込み、よりよく安全に高速に、そして確実な結果を得ることです。 私たちはコンピューター制御とデータ収集を取り入れることで、人間の能力の向上、足場、リフト、ロープで吊り下げられる作業員の必要性の撤廃または削減、高価値資産の迅速な運用、作業場への科学の導入を実現し、経済的価値を創造します。 例えば、高さ100メートルの製油所のフレアスタックを検査する場合、当社の機体を使用すればダウンタイムの500万ドルや1000万ドルを節約でき、1つのプロジェクトにかかる足場の費用にあたる最大100万ドルを節約できます」。
費用効果が高く、楽に実行でき、より徹底した検査が期待されるにつれて、ロボットを採用する産業は急速に増え続けています。 実際、検査ロボット市場は2030年までに139億4250万ドルに達すると予想されています。 精密に制御される飛行ロボットは、アクセスしにくい場所の腐食、漏れ、欠陥を徹底的に検出および予測可能で、オペレーターの安全を維持できます。
