缺陷定位
Os aparelhos Phased Array, assim como os detectores de defeitos por ultrassom convencional, apresentam softwares para identificação da posição dos defeitos e de outros refletores. Normalmente, eles localizam a posição horizontal em relação à sonda, a profundidade em relação à superfície do material e a distância da trajetória do som entre o ponto de índice do feixe e o refletor. Além disso, quando as trajetórias são empregadas, o aparelho identifica o salto da perna em que refletor acontece.
Em primeiro lugar é importante lembrar que o ponto de índice do feixe (ponto onde o centro do feixe de som sai da calço) é uma localização fixada por um calço convencional, e um ponto móvel para calços Phased Array. No caso de rastreamentos lineares, o ponto de índice do feixe moverá por todo o comprimento da sonda assim como as sequências de rastreamento. No caso do rastreamento de setor angular, os componentes angulares diferentes sairão de pontos diferentes do calço.
As imagens da tela abaixo mostram a representação das informações de localização de dois cantos dos refletores em uma placa de aço, uma do sinal da primeira perna, no canto inferior, e outra da segunda perna, no canto superior, visto por uma sonda de uma posição adequada.
Os detectores de defeitos convencionais normalmente usam um único ponto de índice de feixe do calço como referência a partir do qual as profundidades e as distâncias são calculadas. Neste exemplo, a linha superior da primeira exibição indica que o refletor inferior está a 25 mm à frente do ponto do índice de feixe a uma profundidade de 25 mm, e que a medida da trajetória do som do ponto do índice do feixe em relação ao refletor é de 35,35 mm. A segunda tela indica que o refletor superior está a 50 mm à frente do ponto do índice do feixe na superfície (profundidade zero), e que a medida da trajetória do som do ponto do índice do feixe em relação ao refletor é de 70,71 mm. A diferença entre a primeira e a segunda perna é indicada pelas leituras 1L1 e 1L2 (abreviação para porta 1 perna 1 e porta 2 e perna 2, respectivamente) no canto inferior direito da tela.
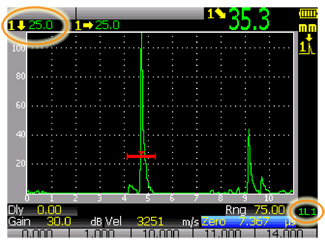
Indicação da primeira perna no canto inferior.
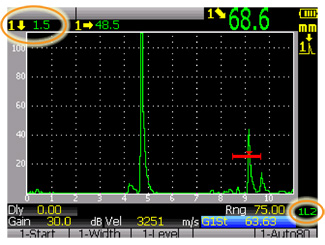
Indicação da segunda perna no canto superior.
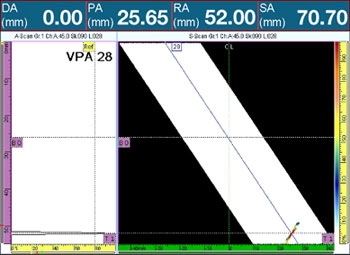
Como o ponto do índice do feixe da sonda Phased Array é variável, uma forma comum de referenciar a posição dos defeitos é em relação à extremidade frontal do calço em lugar do BIP. As seguintes dimensões podem ser calculadas a partir das informações do feixe:

DA = profundidade do refletor na porta A
PA = posição frontal do refletor em relação à ponta do calço
RA = distância entre o ponto de referência do calço e o refletor
SA = comprimento da trajetória do som e o refletor
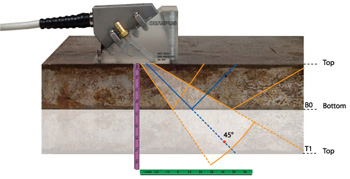
Neste formato de exibição, a transição entre a primeira e segunda perna, e entre a segunda e a terceira perna, são marcadas por uma linha horizontal pontilhada. No exemplo abaixo, o refletor do canto inferior ocorre na área de transição entre as áreas da primeira e segunda perna, e o refletor no canto superior ocorre entre a segunda e a terceira perna. Além disso, as leituras de posição na parte superior da tela mostram a localização do refletor.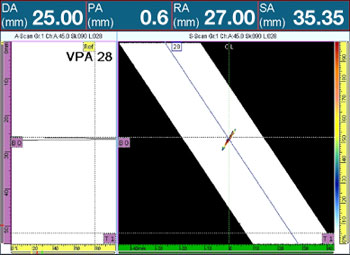
Continua em
Interpretar o rastreamento de setor>>