Introdução
Para apoiar projetistas de instrumentos e equipamentos, nós fornecemos uma grande variedade de objetivas e outros componentes ópticos para fabricantes de sistema de formação de imagem baseada em microscópio. Esses componentes ajudam os engenheiros a projetar equipamentos de inspeção óptica de alta qualidade com eficiência.
Uma aplicação que exige sistemas de formação de imagem baseadas em microscópio é a inspeção de semicondutores. Os fabricantes de semicondutores exigem inspeções rápidas, precisas e limpas ao longo do processo de fabricação. Eles contam com os fabricantes de equipamento de inspeção óptica para desenvolver ferramentas de inspeção que acompanham as demandas do setor. Os fabricantes de semicondutores frequentemente fornecem os conjuntos optomecânicos necessários para inspeção de semicondutores aos especialistas em formação de imagem óptica. Um componente essencial nessa aplicação é o foco automático do sistema óptico, que influencia muito a velocidade de inspeção geral. O foco automático é combinado com o mecanismo em Z motorizado dos sistemas ópticos, iluminação, objetivas de microscópio e uma câmera digital ou sensor para completar o sistema.
Neste livro branco, explicamos como criamos um sistema de ajuste de foco automático (BXC-FSU) em combinação com o mecanismo em Z motorizado do microscópio, iluminador, caixa da lâmpada, lente objetiva e outros componentes para ajudar os fabricantes de semicondutores a concluir as inspeções com mais rapidez e eficiência.
O que é foco automático?
Há dois tipos de sistemas de foco automático:
- Foco de sistemas passivos que usam a imagem observada. Essa técnica é frequentemente chamada de método de contraste de imagem. No entanto, ela não funciona em espécimes de baixo contraste, como wafers desprotegidos. Com esse método, é difícil determinar a direção de focagem, por isso, a platina Z deve ser movida para cima e para baixo para detectar o aumento ou a diminuição do contraste do espécime. Isso diminui a velocidade do foco e torna difícil acompanhá-lo. No entanto, esse método tem a vantagem de ser relativamente barato.
- Os sistemas ativos irradiam luz de uma fonte de luz exclusiva sobre o espécime e focam com base na luz de retorno. Essa técnica é para sistemas de inspeção avançada, onde a espécime não tem contraste, como sistemas de inspeção de wafer desprotegido e tela plana (Figura 1).
 |  |
Figura 1. Inspeção de wafer desprotegido.
Método de pupila dividida ativa
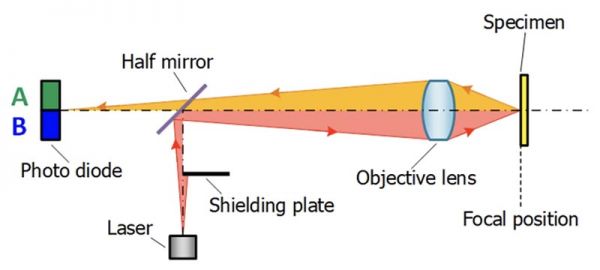
Figura 2. Descrição do método de pupila dividida ativa.
Um método ativo para sensibilidade de foco é o de divisão de pupila (Figura 2). Neste método, a placa de blindagem é colocada entre a fonte de luz e as lentes (Figura 2). A luz emitida da fonte de laser é bloqueada em um dos lados por uma placa de blindagem. Depois de direcionar a luz de laser pela lente objetiva até o espécime, a luz de laser reflete no espécime e entra no fotodiodo de dois segmentos por meio de um meio-espelho. A intensidade da luz que entra de cada lado (Figura 2 A e B) depende de o espécime estar do lado proximal ou distal do foco. A unidade de foco automático detecta o fluxo de corrente por A e B e converte isso em "sinal de erro" usando a equação (A-B)/(A+B). A posição de foco é a posição Z em que a intensidade de luz incidente em ambos os lados do fotodiodo é igual. Em outras palavras, quando o sinal de erro é aproximadamente igual a zero, a unidade de foco automático sabe que o espécime está focado.
A Figura 3 ilustra como os sinais incidentes nos lados A e B do fotodiodo de dois segmentos e os valores do sinal do erro mudam de acordo com a posição do espécime.
Figura 3. Detecção de foco com o método de pupila dividida ativa
Saída do sinal de erro do foco
A caixa de controle da unidade de foco automático recebe o sinal e o transfere ao software que conduz o movimento do Z motorizado. Para enviar as informações de foco ao dispositivo do cliente, o BXC-FSU se combina com o controlador BXC-CBB (Figura 4).
Veja como o sistema BXC-CBB funciona
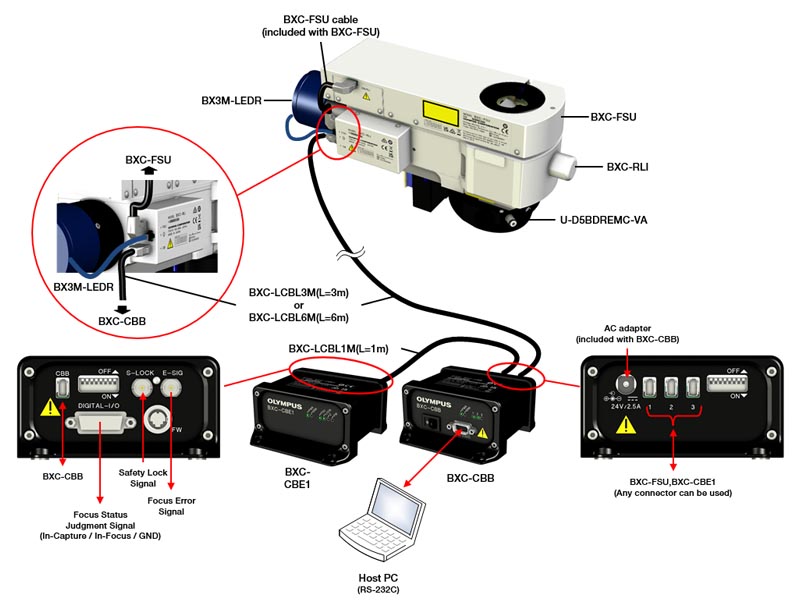
Figura 4. Configuração do sistema BXC-CBB.
As informações de foco passam pelo sistema da seguinte maneira: BXC-FSU→BXC-RLI→BXC-CBB→BXC-CBE1. O controlador BXC-CBE1 cria o sinal analógico que é transferido ao equipamento do cliente com base nas informações de foco originalmente fornecidas pelo BXC-FSU.
Há três tipos de sinais de foco produzidos pelo BXC-CBE1:
- Sinal de erro de foco
- Sinal da captura
- Sinal no foco
O sinal de erro (A-B)/(A+B) descrito acima é enviado como sinal analógico que varia entre -10 V e +10 V, e a direção da posição de foco depende de o sinal ser positivo ou negativo.
A posição em que o sinal de erro cruza 0 V é a posição de foco. Como mostrado na Figura 5, o sinal de foco é ativado quando o sinal de erro está dentro do intervalo limite de foco em torno de 0 V. A faixa de ativação do sinal no foco é definida como o intervalo em que o espécime está na profundidade de foco da lente objetiva (em foco).
No entanto, como mostrado nas caixas vermelhas na Figura 5, o sinal de erro também é 0 V quando o espécime está longe da posição de foco. Isso acontece porque a intensidade da luz de laser refletida do espécime e que incide no fotodiodo de dois segmentos diminui à medida que o espécime se afasta da posição de foco. O sinal no foco é indicado como ativo quando está realmente baixo na Figura 5.
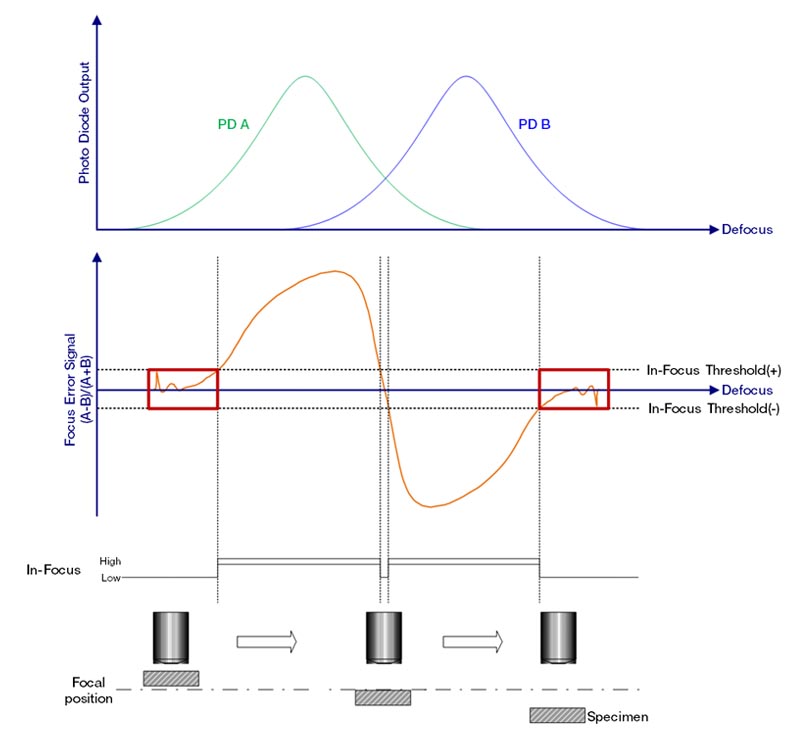
Figura 5. A mudança no sinal do erro (A-B)/(A+B) e o sinal no foco em cada posição Z.
O sinal na captura indica a intensidade da luz de laser emitida da unidade de foco automático e refletida do espécime ao fotodiodo. Como o sistema pode reconhecer a intensidade, ele pode diferenciar se o sinal de zero é causado por baixa intensidade e a amostra não está realmente focada. Esse sinal na captura ocorre quando o espécime está localizado próximo da posição de foco e isso é chamado de intervalo na captura. Quando o espécime está dentro do intervalo na captura, o foco automático pode ser ativado e usado para obter o foco real. Se o espécime está dentro do intervalo na captura é determinado quando a quantidade total de luz (A+B) que incide nos dois fotodiodos divididos ultrapassa certo valor limite (Figura 6).
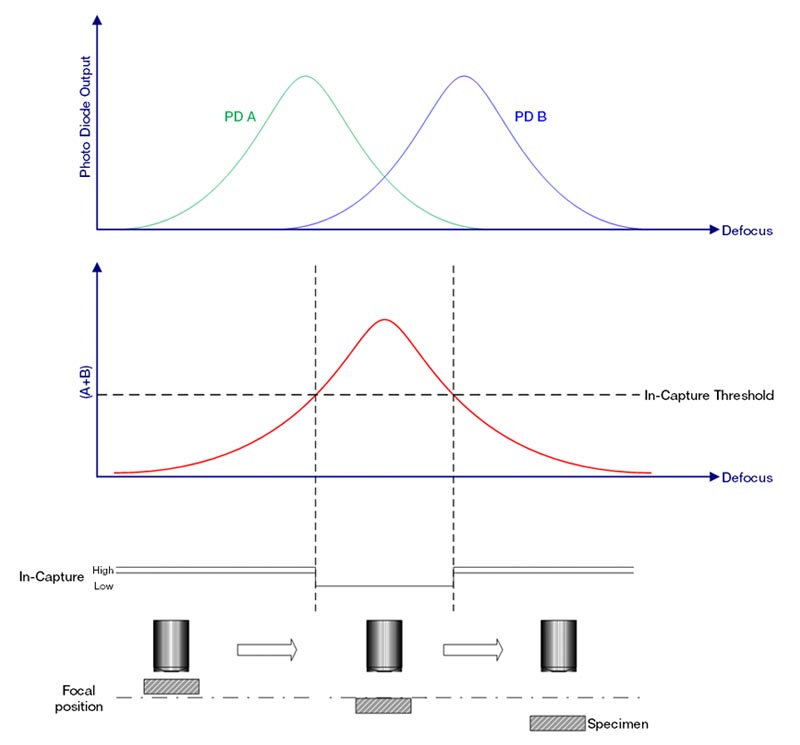
Figura 6. A variação da intensidade de luz total A+B e o sinal na captura em cada posição Z. O sinal na captura é ativado quando A+B ultrapassa um certo valor limite. O sinal na captura é indicado como ativo em baixo nesta figura.
Para resumir, a posição de foco é o intervalo em que a saída do sinal na captura do BXC-CBE1 está ativa, o sinal de erro está próximo de 0 V e o sinal no foco também está ativo. A Figura 7 abaixo mostra o status dos sinais na captura e no foco em cada posição Z. Aqui, os sinais na captura e no foco estão ativos em baixo.
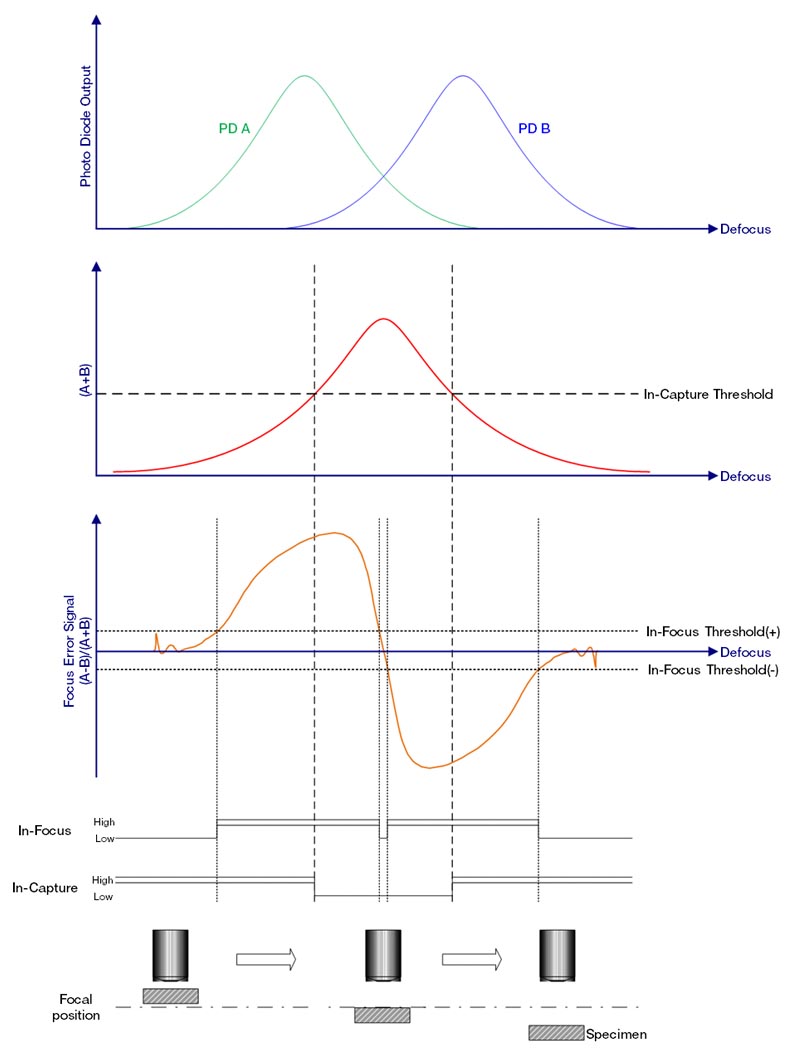
Figura 7. Mudanças nos sinais na captura e no foco.
Com base nas informações acima, monitorar a saída dos três sinais do BXC-CBE1 (sinal de erro, sinal na captura e sinal no foco) possibilita encontrar o foco e se comunicar com o motor Z e unidade Z selecionadas do cliente. Todos eles estão funcionando de forma ativa e coordenada, à medida que as platinas se movem para cada local de inspeção (Figura 8).
Figura 8. A relação entre a lente objetiva, imagem real e forma de onda (sinais do osciloscópio; sinal de erro: verde; no foco: amarelo; na captura: azul).
Um osciloscópio pode confirmar que todos os sinais estão ativos quando a imagem está focada. Isso pode ser usado no design e desenvolvimento do instrumento.
Projeção de laser multiponto
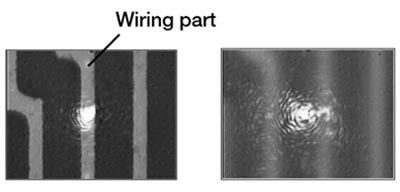
A topografia do espécime pode afetar o sucesso do processo de focalização. Quando um laser é projetado em um espécime em um único ponto e o espécime tem uma estrutura de escada, como padrões de fio fino ou substratos de semicondutor, a posição de foco pode mudar frequentemente à medida que o espécime é escaneado. Isso é chamado de chatter (trepidação). Também é possível ver a deterioração da relação sinal-ruído (SNR) dos sinais de erro de foco devido à dispersão da luz AF na borda do degrau (Figura 9). Ambas as situações dificultam manter o foco ao longo do processo de inspeção e o tornam mais lento.
Para reduzir a trepidação e melhorar a estabilidade do foco, o BXC-FSU emprega um sistema de foco automático multiponto ativo (Figuras 10 e 11). Os pontos são organizados em um ângulo de 45° ao longo do campo de visão, e o sinal médio de todos os pontos produzem uma posição de foco média. A média do foco ao longo do campo de visão possibilita reproduzir o foco automático quando o espécime tem várias alturas dentro do campo de visão.
(a) Variação na posição de foco (b) Dispersão pelas bordas
Figura 9. Fatores de instabilidade do foco.
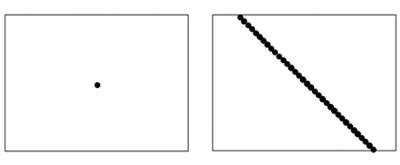
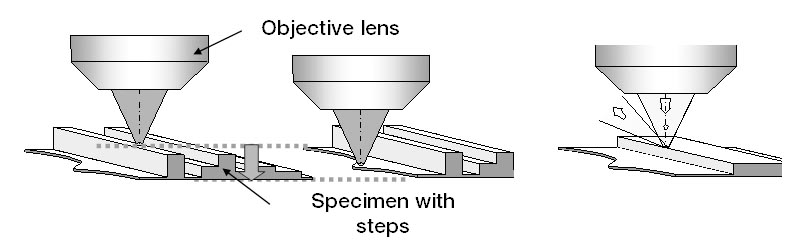
(a) Método de ponto único (b) Método multiponto
Figura 10. Comparação dos pontos focais na superfície do espécime.
(a) No método de ponto único, ao deslocar o espécime para o lado em que há um degrau, a posição Z move-se significativamente, fazendo com que a imagem fique fora de foco.
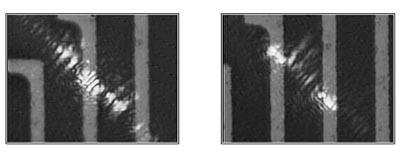
(b) Ao usar o método multiponto, a posição de foco não muda mesmo se houver um degrau no espécime e isso se traduz lateralmente.
Figura 11. Comparação da estabilidade do foco entre os métodos de detecção de ponto único e multiponto com espécimes com degraus. Pontos brilhantes indicam os pontos de detecção no foco.
Correção de aberração cromática
Como a unidade de foco automático BXC-FSU usa uma fonte de luz laser quase infravermelha, a posição da platina para foco é diferente para o laser e a fonte de luz branca. Isso deve-se a aberração cromática em que o índice de refração do vidro usado nas lentes depende do comprimento de onda da luz (Figura 12). Por esse motivo, o BXC-FSU está equipado com um mecanismo para corrigir aberração cromática e igualar a posição de foco da luz visível e a luz de luz laser infravermelha. A aberração cromática é corrigida cada vez que a objetiva é trocada pela porta-objetiva com base em um valor predefinido atribuído no software.
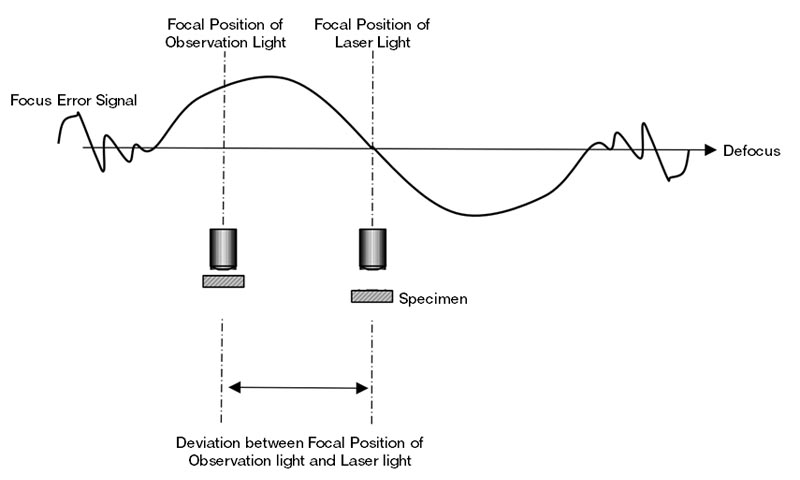
Figura 12 . A aberração cromática na lente objetiva resulta em duas posições de foco para luz visível e luz laser.
Conclusão
A tecnologia de foco automático maximiza o tempo de escaneamento e a precisão da resolução. Entender os princípios de detecção de foco ajudará a aproveitar o BXC-FSU ao máximo e incorporá-lo ao seu dispositivo.
Para avaliar se esse dispositivo funcionará no seu produto, acesse a página de recursos para encontrar documentos adicionais.
Para ajudar a entender o controle de comando dos sistemas BXC-CBB e BXC-CBRLM, você pode baixar a amostra de software para experimentar.
O manual do aplicativo BXC-FSU, que explica como usar o FSU, também está disponível.
Para obter uma cópia, preencha um formulário de consulta e escreva "Solicitação de manual de aplicativo" na seção de comentários.


